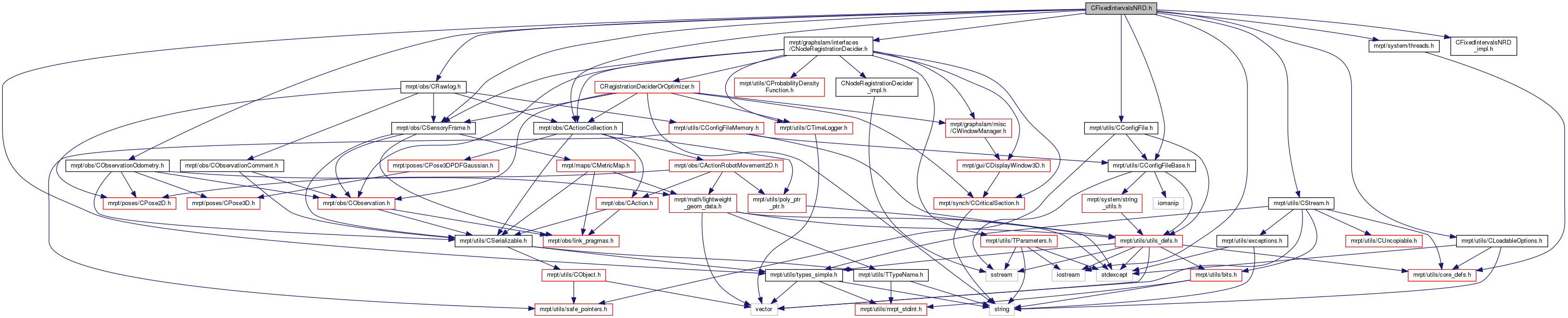
#include <mrpt/obs/CObservationOdometry.h>#include <mrpt/obs/CSensoryFrame.h>#include <mrpt/obs/CActionCollection.h>#include <mrpt/obs/CRawlog.h>#include <mrpt/utils/CLoadableOptions.h>#include <mrpt/utils/CConfigFile.h>#include <mrpt/utils/CConfigFileBase.h>#include <mrpt/utils/CStream.h>#include <mrpt/utils/types_simple.h>#include <mrpt/system/threads.h>#include <mrpt/graphslam/interfaces/CNodeRegistrationDecider.h>#include <iostream>#include "CFixedIntervalsNRD_impl.h"
Include dependency graph for CFixedIntervalsNRD.h:
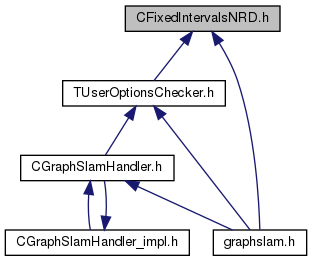
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mrpt::graphslam::deciders::CFixedIntervalsNRD< GRAPH_T > |
| Fixed Intervals Odometry-based Node Registration. More... | |
| struct | mrpt::graphslam::deciders::CFixedIntervalsNRD< GRAPH_T >::TParams |
| Parameters structure for managing the relevant to the decider variables in a compact manner. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::graphslam | |
| SLAM methods related to graphs of pose constraints. | |
| mrpt::graphslam::deciders | |