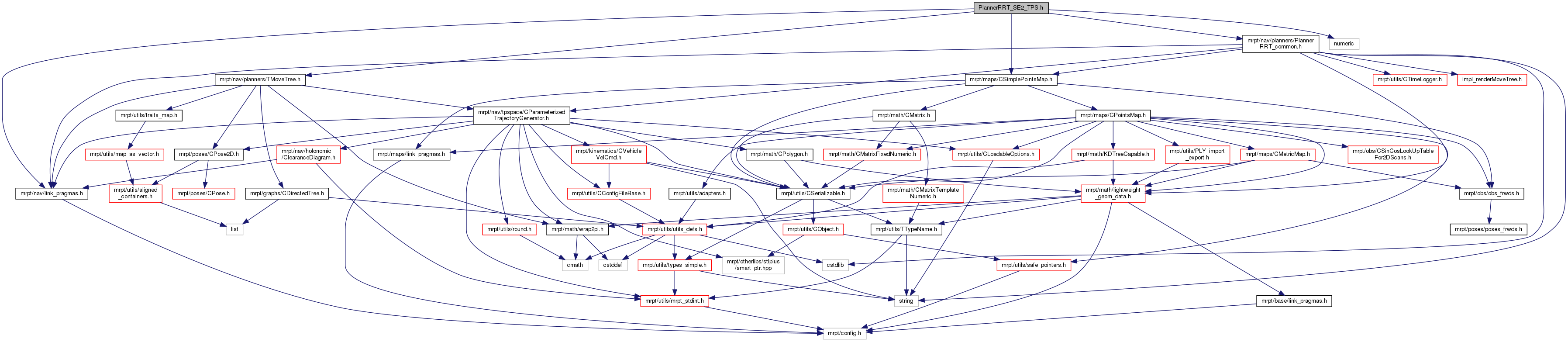
#include <mrpt/maps/CSimplePointsMap.h>#include <mrpt/nav/planners/TMoveTree.h>#include <mrpt/nav/planners/PlannerRRT_common.h>#include <numeric>#include <mrpt/nav/link_pragmas.h>
Include dependency graph for PlannerRRT_SE2_TPS.h:
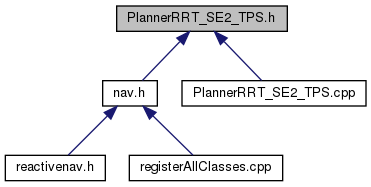
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mrpt::nav::PlannerRRT_SE2_TPS |
| TP Space-based RRT path planning for SE(2) (planar) robots. More... | |
| struct | mrpt::nav::PlannerRRT_SE2_TPS::TPlannerInput |
| struct | mrpt::nav::PlannerRRT_SE2_TPS::TPlannerResult |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::nav | |