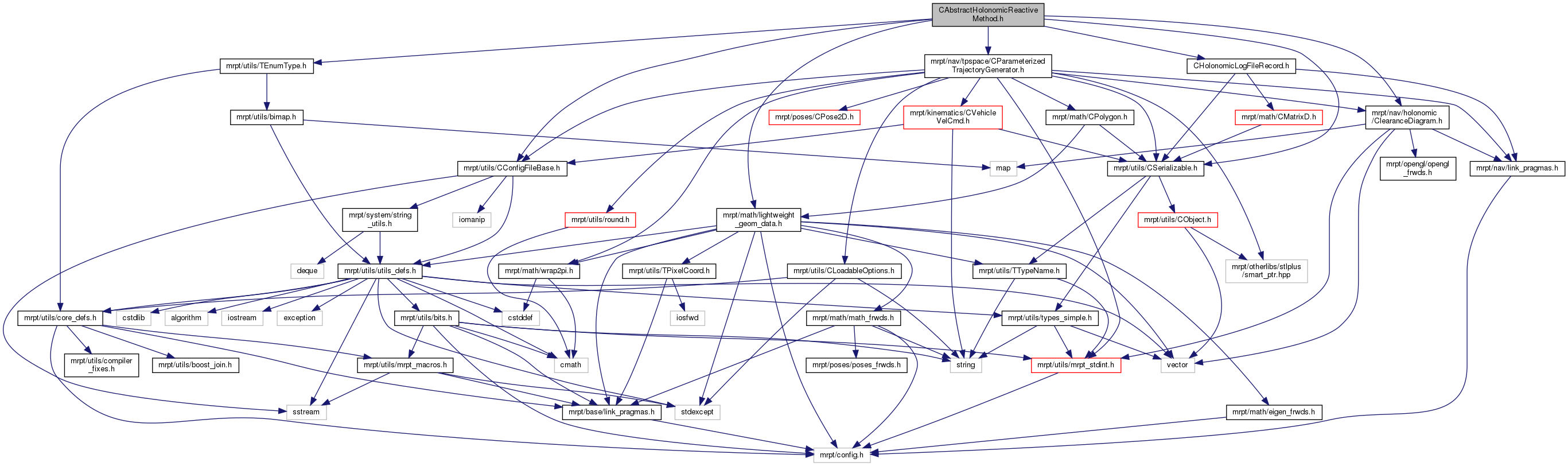
#include <mrpt/math/lightweight_geom_data.h>#include <mrpt/utils/TEnumType.h>#include <mrpt/utils/CConfigFileBase.h>#include <mrpt/utils/CSerializable.h>#include <mrpt/nav/tpspace/CParameterizedTrajectoryGenerator.h>#include <mrpt/nav/holonomic/ClearanceDiagram.h>#include "CHolonomicLogFileRecord.h"
Include dependency graph for CAbstractHolonomicReactiveMethod.h:
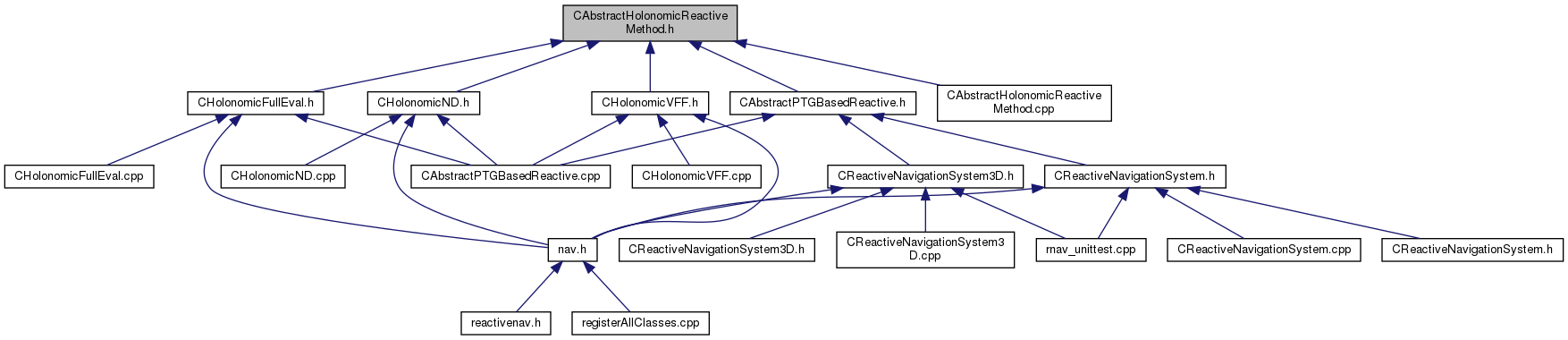
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mrpt::nav::CAbstractHolonomicReactiveMethod |
| A base class for holonomic reactive navigation methods. More... | |
| struct | mrpt::nav::CAbstractHolonomicReactiveMethod::NavInput |
| Input parameters for CAbstractHolonomicReactiveMethod::navigate() More... | |
| struct | mrpt::nav::CAbstractHolonomicReactiveMethod::NavOutput |
| Output for CAbstractHolonomicReactiveMethod::navigate() More... | |
| struct | mrpt::utils::TEnumTypeFiller< nav::THolonomicMethod > |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::nav | |
| mrpt::utils | |
| Classes for serialization, sockets, ini-file manipulation, streams, list of properties-values, timewatch, extensions to STL. | |
Enumerations | |
| enum | mrpt::nav::THolonomicMethod { mrpt::nav::hmVIRTUAL_FORCE_FIELDS = 0 , mrpt::nav::hmSEARCH_FOR_BEST_GAP = 1 , mrpt::nav::hmFULL_EVAL = 2 } |
| The implemented reactive navigation methods. More... | |
Functions | |
| ::mrpt::utils::CStream & | mrpt::nav::operator>> (mrpt::utils::CStream &in, CAbstractHolonomicReactiveMethodPtr &pObj) |