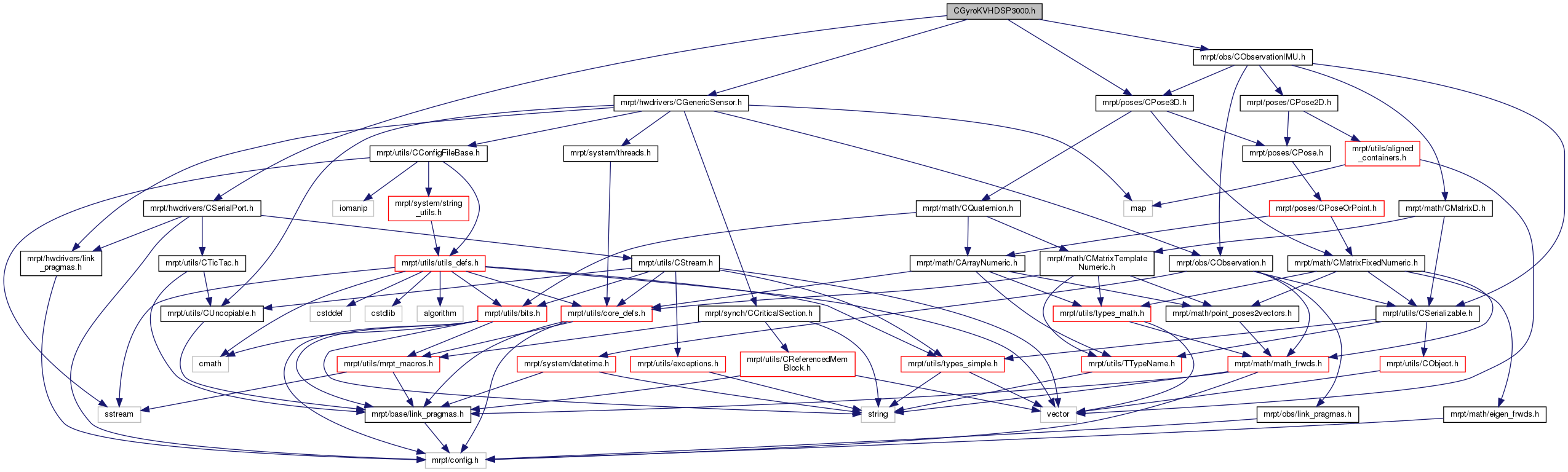
#include <mrpt/hwdrivers/CGenericSensor.h>#include <mrpt/hwdrivers/CSerialPort.h>#include <mrpt/poses/CPose3D.h>#include <mrpt/obs/CObservationIMU.h>
Include dependency graph for CGyroKVHDSP3000.h:
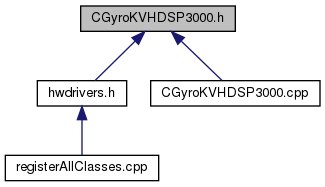
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mrpt::hwdrivers::CGyroKVHDSP3000 |
| A class for interfacing KVH DSP 3000 gyroscope with an assynchronous serial communication (product SN : 02-1222-01). More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::hwdrivers | |
| Contains classes for various device interfaces. | |
Enumerations | |
| enum | mrpt::hwdrivers::GYRO_MODE { mrpt::hwdrivers::RATE , mrpt::hwdrivers::INCREMENTAL_ANGLE , mrpt::hwdrivers::INTEGRATED_ANGLE } |