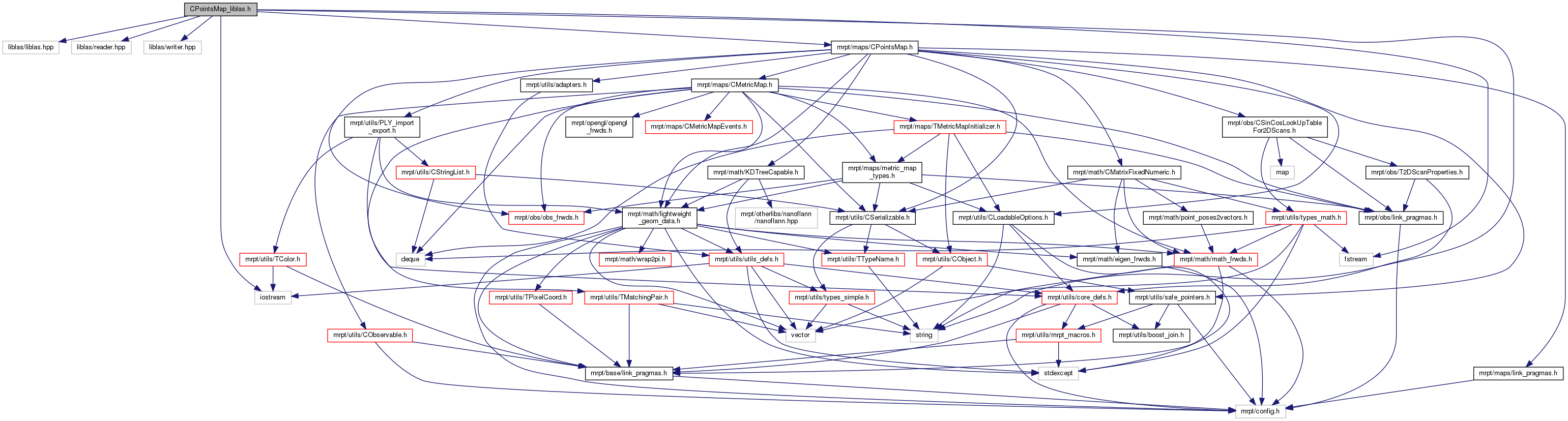
#include <liblas/liblas.hpp>
#include <liblas/reader.hpp>
#include <liblas/writer.hpp>
#include <mrpt/maps/CPointsMap.h>
#include <string>
#include <iostream>
#include <fstream>
Go to the source code of this file.
|
| | mrpt |
| | This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries.
|
| |
| | mrpt::maps |
| |
|
| template<class POINTSMAP > |
| bool | mrpt::maps::saveLASFile (const POINTSMAP &ptmap, const std::string &filename, const LAS_WriteParams ¶ms=LAS_WriteParams()) |
| | Save the point cloud as an ASPRS LAS binary file (requires MRPT built against liblas). More...
|
| |
| template<class POINTSMAP > |
| bool | mrpt::maps::loadLASFile (POINTSMAP &ptmap, const std::string &filename, LAS_HeaderInfo &out_headerInfo, const LAS_LoadParams ¶ms=LAS_LoadParams()) |
| | Load the point cloud from an ASPRS LAS binary file (requires MRPT built against liblas). More...
|
| |