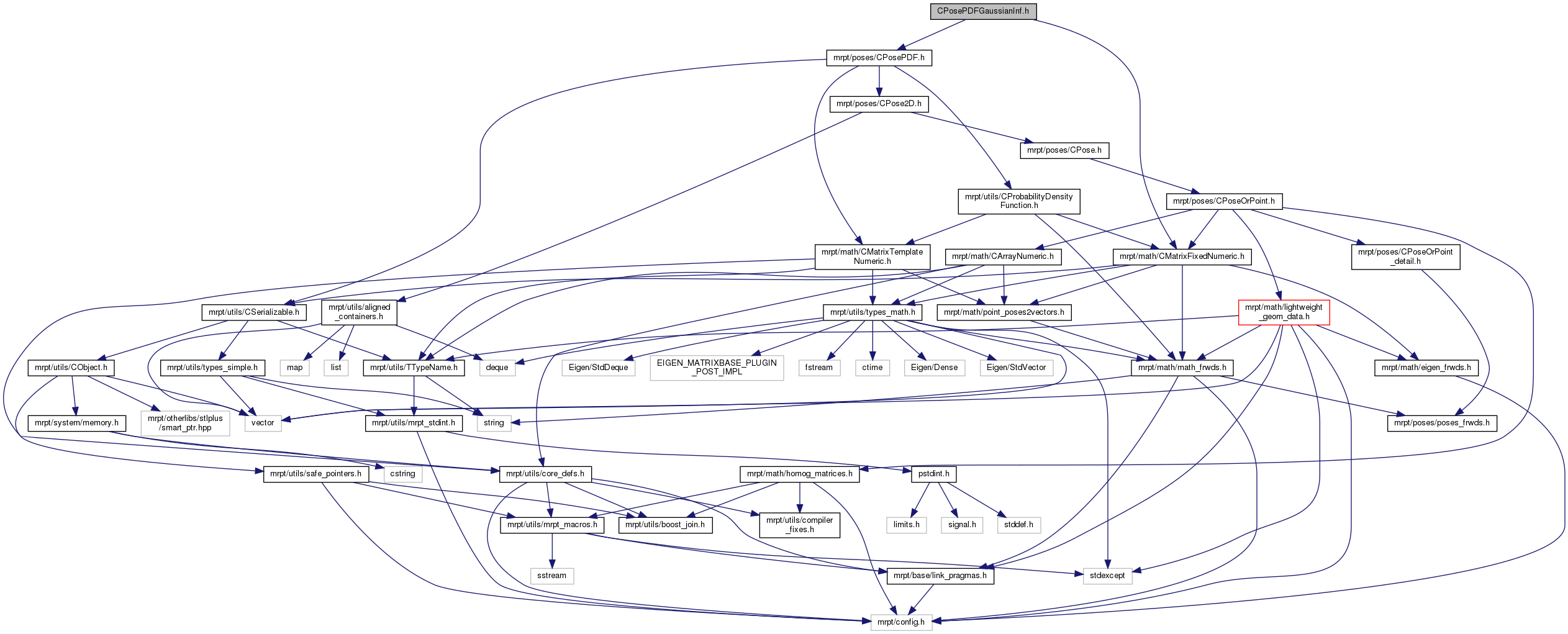
Include dependency graph for CPosePDFGaussianInf.h:
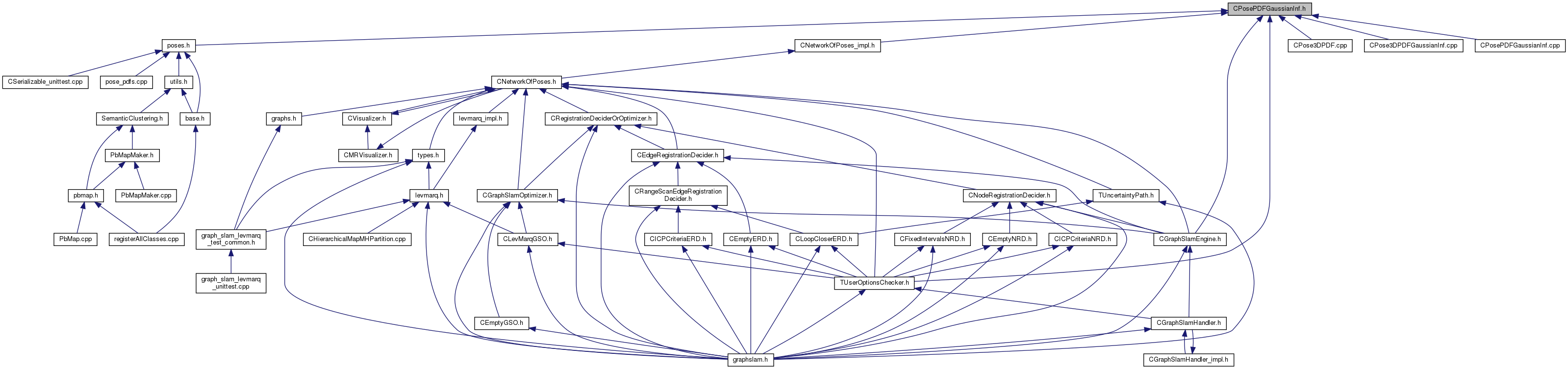
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mrpt::poses::CPosePDFGaussianInf |
A Probability Density function (PDF) of a 2D pose ![$ p(\mathbf{x}) = [x ~ y ~ \phi ]^t $](form_70.png) as a Gaussian with a mean and the inverse of the covariance. More... as a Gaussian with a mean and the inverse of the covariance. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::poses | |
| Classes for 2D/3D geometry representation, both of single values and probability density distributions (PDFs) in many forms. | |
Functions | |
| ::mrpt::utils::CStream & | mrpt::poses::operator>> (mrpt::utils::CStream &in, CPosePDFGaussianInfPtr &pObj) |
| mrpt::poses::DEFINE_SERIALIZABLE_POST_CUSTOM_BASE (CPosePDFGaussianInf, CPosePDF) | |
| bool BASE_IMPEXP | mrpt::poses::operator== (const CPosePDFGaussianInf &p1, const CPosePDFGaussianInf &p2) |
| CPosePDFGaussianInf BASE_IMPEXP | mrpt::poses::operator+ (const CPosePDFGaussianInf &a, const CPosePDFGaussianInf &b) |
| Pose compose operator: RES = A (+) B , computing both the mean and the covariance. More... | |
| CPosePDFGaussianInf BASE_IMPEXP | mrpt::poses::operator- (const CPosePDFGaussianInf &a, const CPosePDFGaussianInf &b) |
| Pose inverse compose operator: RES = A (-) B , computing both the mean and the covariance. More... | |
| poses::CPosePDFGaussianInf BASE_IMPEXP | mrpt::poses::operator+ (const mrpt::poses::CPose2D &A, const mrpt::poses::CPosePDFGaussianInf &B) |
Returns the Gaussian distribution of  , for , for  . More... . More... | |
| std::ostream BASE_IMPEXP & | mrpt::poses::operator<< (std::ostream &out, const CPosePDFGaussianInf &obj) |
| Dumps the mean and covariance matrix to a text stream. More... | |