#include <mrpt/nav/reactive/CRobot2NavInterface.h>#include <mrpt/kinematics/CVehicleSimul_Holo.h>#include <mrpt/kinematics/CVehicleSimul_DiffDriven.h>
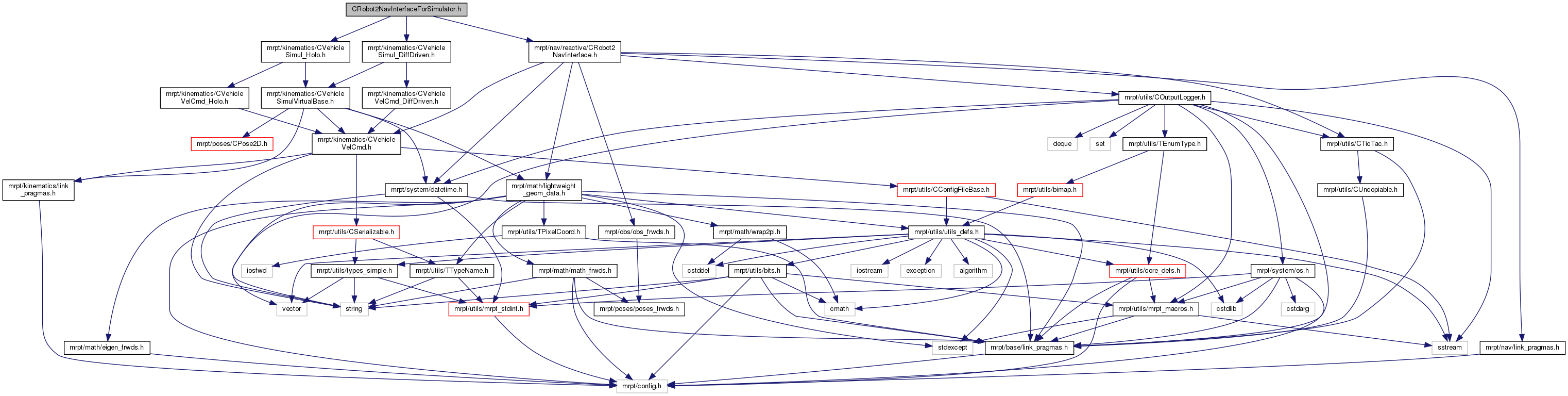
Include dependency graph for CRobot2NavInterfaceForSimulator.h:
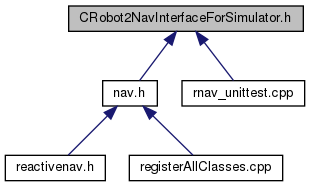
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mrpt::nav::CRobot2NavInterfaceForSimulator_Holo |
| CRobot2NavInterface implemented for a simulator object based on mrpt::kinematics::CVehicleSimul_Holo. More... | |
| class | mrpt::nav::CRobot2NavInterfaceForSimulator_DiffDriven |
CRobot2NavInterface implemented for a simulator object based on mrpt::kinematics::CVehicleSimul_DiffDriven Only senseObstacles() remains virtual for the user to implement it. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::nav | |