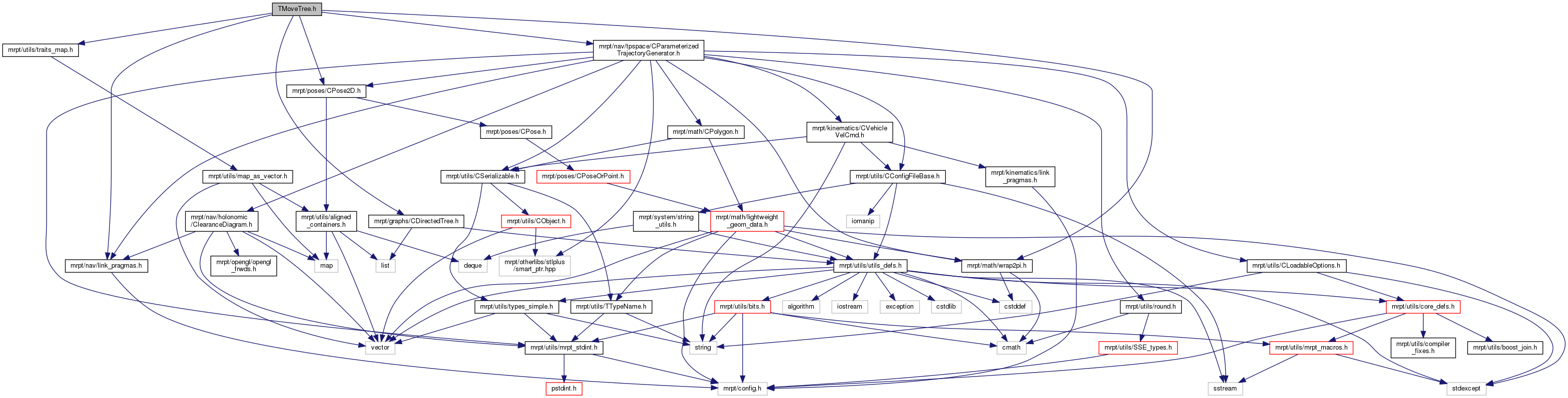
#include <mrpt/graphs/CDirectedTree.h>#include <mrpt/utils/traits_map.h>#include <mrpt/math/wrap2pi.h>#include <mrpt/poses/CPose2D.h>#include <mrpt/nav/tpspace/CParameterizedTrajectoryGenerator.h>#include <mrpt/nav/link_pragmas.h>
Include dependency graph for TMoveTree.h:
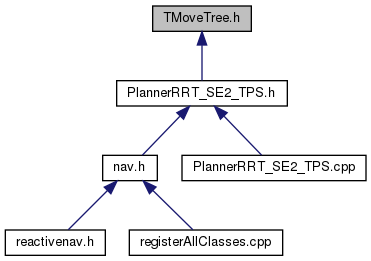
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mrpt::nav::TMoveTree< NODE_TYPE_DATA, EDGE_TYPE, MAPS_IMPLEMENTATION > |
| This class contains motions and motions tree structures for the hybrid navigation algorithm. More... | |
| struct | mrpt::nav::TMoveTree< NODE_TYPE_DATA, EDGE_TYPE, MAPS_IMPLEMENTATION >::node_t |
| struct | mrpt::nav::TMoveEdgeSE2_TP |
| An edge for the move tree used for planning in SE2 and TP-space. More... | |
| struct | mrpt::nav::TNodeSE2 |
| struct | mrpt::nav::PoseDistanceMetric< TNodeSE2 > |
| Pose metric for SE(2) More... | |
| struct | mrpt::nav::TNodeSE2_TP |
| struct | mrpt::nav::PoseDistanceMetric< TNodeSE2_TP > |
| Pose metric for SE(2) limited to a given PTG manifold. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::nav | |
Typedefs | |
| typedef TMoveTree< TNodeSE2_TP, TMoveEdgeSE2_TP > | mrpt::nav::TMoveTreeSE2_TP |
| tree data structure for planning in SE2 within TP-Space manifolds More... | |