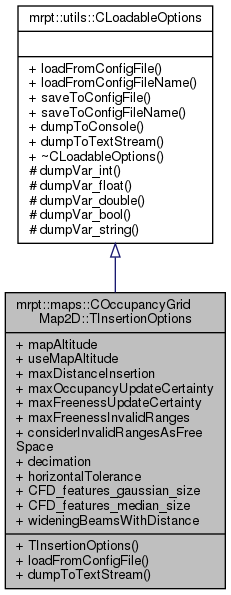
Detailed Description
With this struct options are provided to the observation insertion process.
- See also
- CObservation::insertIntoGridMap
Definition at line 343 of file maps/COccupancyGridMap2D.h.
#include <mrpt/maps/COccupancyGridMap2D.h>
Public Member Functions | |
| TInsertionOptions () | |
| Initilization of default parameters. More... | |
| void | loadFromConfigFile (const mrpt::utils::CConfigFileBase &source, const std::string §ion) MRPT_OVERRIDE |
| This method load the options from a ".ini" file. More... | |
| void | dumpToTextStream (mrpt::utils::CStream &out) const MRPT_OVERRIDE |
| This method should clearly display all the contents of the structure in textual form, sending it to a CStream. More... | |
| void | loadFromConfigFileName (const std::string &config_file, const std::string §ion) |
| Behaves like loadFromConfigFile, but you can pass directly a file name and a temporary CConfigFile object will be created automatically to load the file. More... | |
| virtual void | saveToConfigFile (mrpt::utils::CConfigFileBase &target, const std::string §ion) const |
| This method saves the options to a ".ini"-like file or memory-stored string list. More... | |
| void | saveToConfigFileName (const std::string &config_file, const std::string §ion) const |
| Behaves like saveToConfigFile, but you can pass directly a file name and a temporary CConfigFile object will be created automatically to save the file. More... | |
| void | dumpToConsole () const |
| Just like dumpToTextStream() but sending the text to the console (std::cout) More... | |
Public Attributes | |
| float | mapAltitude |
| The altitude (z-axis) of 2D scans (within a 0.01m tolerance) for they to be inserted in this map! More... | |
| bool | useMapAltitude |
| The parameter "mapAltitude" has effect while inserting observations in the grid only if this is true. More... | |
| float | maxDistanceInsertion |
| The largest distance at which cells will be updated (Default 15 meters) More... | |
| float | maxOccupancyUpdateCertainty |
| A value in the range [0.5,1] used for updating cell with a bayesian approach (default 0.8) More... | |
| float | maxFreenessUpdateCertainty |
| A value in the range [0.5,1] for updating a free cell. (default=0 means use the same than maxOccupancyUpdateCertainty) More... | |
| float | maxFreenessInvalidRanges |
| Like maxFreenessUpdateCertainty, but for invalid ranges (no echo). (default=0 means same than maxOccupancyUpdateCertainty) More... | |
| bool | considerInvalidRangesAsFreeSpace |
| If set to true (default), invalid range values (no echo rays) as consider as free space until "maxOccupancyUpdateCertainty", but ONLY when the previous and next rays are also an invalid ray. More... | |
| uint16_t | decimation |
| Specify the decimation of the range scan (default=1 : take all the range values!) More... | |
| float | horizontalTolerance |
| The tolerance in rads in pitch & roll for a laser scan to be considered horizontal, then processed by calls to this class (default=0). More... | |
| float | CFD_features_gaussian_size |
| Gaussian sigma of the filter used in getAsImageFiltered (for features detection) (Default=1) (0:Disabled) More... | |
| float | CFD_features_median_size |
| Size of the Median filter used in getAsImageFiltered (for features detection) (Default=3) (0:Disabled) More... | |
| bool | wideningBeamsWithDistance |
| Enabled: Rays widen with distance to approximate the real behavior of lasers, disabled: insert rays as simple lines (Default=false) More... | |
Static Protected Member Functions | |
| static void | dumpVar_int (CStream &out, const char *varName, int v) |
| Used to print variable info from dumpToTextStream with the macro LOADABLEOPTS_DUMP_VAR. More... | |
| static void | dumpVar_float (CStream &out, const char *varName, float v) |
| static void | dumpVar_double (CStream &out, const char *varName, double v) |
| static void | dumpVar_bool (CStream &out, const char *varName, bool v) |
| static void | dumpVar_string (CStream &out, const char *varName, const std::string &v) |
Constructor & Destructor Documentation
◆ TInsertionOptions()
| COccupancyGridMap2D::TInsertionOptions::TInsertionOptions | ( | ) |
Initilization of default parameters.
Definition at line 1141 of file COccupancyGridMap2D_insert.cpp.
Member Function Documentation
◆ dumpToConsole()
|
inherited |
Just like dumpToTextStream() but sending the text to the console (std::cout)
Definition at line 47 of file CLoadableOptions.cpp.
References mrpt::utils::CLoadableOptions::dumpToTextStream(), and loadable_opts_my_cout.
Referenced by mrpt::hmtslam::CTopLCDetector_GridMatching::computeTopologicalObservationModel(), mrpt::hmtslam::CHMTSLAM::loadOptions(), and mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::printParams().
◆ dumpToTextStream()
|
virtual |
This method should clearly display all the contents of the structure in textual form, sending it to a CStream.
The default implementation in this base class relies on saveToConfigFile() to generate a plain text representation of all the parameters.
Reimplemented from mrpt::utils::CLoadableOptions.
Definition at line 1184 of file COccupancyGridMap2D_insert.cpp.
References LOADABLEOPTS_DUMP_VAR, and mrpt::utils::CStream::printf().
◆ dumpVar_bool()
|
staticprotectedinherited |
Definition at line 67 of file CLoadableOptions.cpp.
References LOADABLEOPTS_COLUMN_WIDTH, and mrpt::utils::CStream::printf().
◆ dumpVar_double()
|
staticprotectedinherited |
Definition at line 62 of file CLoadableOptions.cpp.
References LOADABLEOPTS_COLUMN_WIDTH, and mrpt::utils::CStream::printf().
◆ dumpVar_float()
|
staticprotectedinherited |
Definition at line 57 of file CLoadableOptions.cpp.
References LOADABLEOPTS_COLUMN_WIDTH, and mrpt::utils::CStream::printf().
◆ dumpVar_int()
|
staticprotectedinherited |
Used to print variable info from dumpToTextStream with the macro LOADABLEOPTS_DUMP_VAR.
Definition at line 52 of file CLoadableOptions.cpp.
References LOADABLEOPTS_COLUMN_WIDTH, and mrpt::utils::CStream::printf().
◆ dumpVar_string()
|
staticprotectedinherited |
Definition at line 72 of file CLoadableOptions.cpp.
References LOADABLEOPTS_COLUMN_WIDTH, and mrpt::utils::CStream::printf().
◆ loadFromConfigFile()
|
virtual |
This method load the options from a ".ini" file.
Only those parameters found in the given "section" and having the same name that the variable are loaded. Those not found in the file will stay with their previous values (usually the default values loaded at initialization). An example of an ".ini" file:
Implements mrpt::utils::CLoadableOptions.
Definition at line 1162 of file COccupancyGridMap2D_insert.cpp.
References MRPT_LOAD_CONFIG_VAR, and MRPT_LOAD_CONFIG_VAR_DEGREES.
◆ loadFromConfigFileName()
|
inherited |
Behaves like loadFromConfigFile, but you can pass directly a file name and a temporary CConfigFile object will be created automatically to load the file.
- See also
- loadFromConfigFile
Definition at line 23 of file CLoadableOptions.cpp.
References mrpt::utils::CLoadableOptions::loadFromConfigFile().
Referenced by mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::loadParams().
◆ saveToConfigFile()
|
virtualinherited |
This method saves the options to a ".ini"-like file or memory-stored string list.
- See also
- loadFromConfigFile, saveToConfigFileName
Reimplemented in mrpt::vision::TMultiResDescOptions, mrpt::vision::TMultiResDescMatchOptions, mrpt::nav::CPTG_RobotShape_Circular, mrpt::nav::CPTG_RobotShape_Polygonal, mrpt::nav::CParameterizedTrajectoryGenerator, mrpt::nav::CAbstractPTGBasedReactive::TAbstractPTGNavigatorParams, mrpt::nav::CAbstractNavigator::TAbstractNavigatorParams, mrpt::nav::CPTG_DiffDrive_CollisionGridBased, mrpt::nav::CHolonomicND::TOptions, mrpt::nav::CWaypointsNavigator::TWaypointsNavigatorParams, mrpt::nav::CHolonomicFullEval::TOptions, mrpt::nav::CReactiveNavigationSystem::TReactiveNavigatorParams, mrpt::nav::CHolonomicVFF::TOptions, mrpt::nav::CMultiObjectiveMotionOptimizerBase::TParamsBase, mrpt::maps::CPointCloudFilterByDistance::TOptions, mrpt::nav::CPTG_DiffDrive_C, mrpt::nav::CPTG_DiffDrive_alpha, mrpt::nav::CMultiObjMotionOpt_Scalarization::TParams, mrpt::nav::CPTG_DiffDrive_CC, mrpt::nav::CPTG_DiffDrive_CCS, mrpt::nav::CPTG_DiffDrive_CS, and mrpt::nav::CPTG_Holo_Blend.
Definition at line 31 of file CLoadableOptions.cpp.
References MRPT_UNUSED_PARAM.
Referenced by mrpt::utils::CLoadableOptions::dumpToTextStream(), and mrpt::utils::CLoadableOptions::saveToConfigFileName().
◆ saveToConfigFileName()
|
inherited |
Behaves like saveToConfigFile, but you can pass directly a file name and a temporary CConfigFile object will be created automatically to save the file.
- See also
- saveToConfigFile, loadFromConfigFileName
Definition at line 39 of file CLoadableOptions.cpp.
References mrpt::utils::CLoadableOptions::saveToConfigFile().
Member Data Documentation
◆ CFD_features_gaussian_size
| float mrpt::maps::COccupancyGridMap2D::TInsertionOptions::CFD_features_gaussian_size |
Gaussian sigma of the filter used in getAsImageFiltered (for features detection) (Default=1) (0:Disabled)
Definition at line 373 of file maps/COccupancyGridMap2D.h.
◆ CFD_features_median_size
| float mrpt::maps::COccupancyGridMap2D::TInsertionOptions::CFD_features_median_size |
Size of the Median filter used in getAsImageFiltered (for features detection) (Default=3) (0:Disabled)
Definition at line 374 of file maps/COccupancyGridMap2D.h.
◆ considerInvalidRangesAsFreeSpace
| bool mrpt::maps::COccupancyGridMap2D::TInsertionOptions::considerInvalidRangesAsFreeSpace |
If set to true (default), invalid range values (no echo rays) as consider as free space until "maxOccupancyUpdateCertainty", but ONLY when the previous and next rays are also an invalid ray.
Definition at line 370 of file maps/COccupancyGridMap2D.h.
◆ decimation
| uint16_t mrpt::maps::COccupancyGridMap2D::TInsertionOptions::decimation |
Specify the decimation of the range scan (default=1 : take all the range values!)
Definition at line 371 of file maps/COccupancyGridMap2D.h.
◆ horizontalTolerance
| float mrpt::maps::COccupancyGridMap2D::TInsertionOptions::horizontalTolerance |
The tolerance in rads in pitch & roll for a laser scan to be considered horizontal, then processed by calls to this class (default=0).
Definition at line 372 of file maps/COccupancyGridMap2D.h.
Referenced by mrpt::maps::COccupancyGridMap2D::internal_canComputeObservationLikelihood().
◆ mapAltitude
| float mrpt::maps::COccupancyGridMap2D::TInsertionOptions::mapAltitude |
The altitude (z-axis) of 2D scans (within a 0.01m tolerance) for they to be inserted in this map!
Definition at line 364 of file maps/COccupancyGridMap2D.h.
Referenced by mrpt::maps::COccupancyGridMap2D::internal_canComputeObservationLikelihood().
◆ maxDistanceInsertion
| float mrpt::maps::COccupancyGridMap2D::TInsertionOptions::maxDistanceInsertion |
The largest distance at which cells will be updated (Default 15 meters)
Definition at line 366 of file maps/COccupancyGridMap2D.h.
◆ maxFreenessInvalidRanges
| float mrpt::maps::COccupancyGridMap2D::TInsertionOptions::maxFreenessInvalidRanges |
Like maxFreenessUpdateCertainty, but for invalid ranges (no echo). (default=0 means same than maxOccupancyUpdateCertainty)
Definition at line 369 of file maps/COccupancyGridMap2D.h.
◆ maxFreenessUpdateCertainty
| float mrpt::maps::COccupancyGridMap2D::TInsertionOptions::maxFreenessUpdateCertainty |
A value in the range [0.5,1] for updating a free cell. (default=0 means use the same than maxOccupancyUpdateCertainty)
Definition at line 368 of file maps/COccupancyGridMap2D.h.
◆ maxOccupancyUpdateCertainty
| float mrpt::maps::COccupancyGridMap2D::TInsertionOptions::maxOccupancyUpdateCertainty |
A value in the range [0.5,1] used for updating cell with a bayesian approach (default 0.8)
Definition at line 367 of file maps/COccupancyGridMap2D.h.
◆ useMapAltitude
| bool mrpt::maps::COccupancyGridMap2D::TInsertionOptions::useMapAltitude |
The parameter "mapAltitude" has effect while inserting observations in the grid only if this is true.
Definition at line 365 of file maps/COccupancyGridMap2D.h.
Referenced by mrpt::maps::COccupancyGridMap2D::internal_canComputeObservationLikelihood().
◆ wideningBeamsWithDistance
| bool mrpt::maps::COccupancyGridMap2D::TInsertionOptions::wideningBeamsWithDistance |
Enabled: Rays widen with distance to approximate the real behavior of lasers, disabled: insert rays as simple lines (Default=false)
Definition at line 375 of file maps/COccupancyGridMap2D.h.