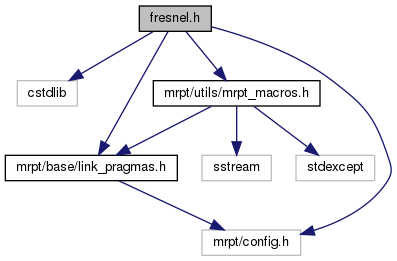
#include <cstdlib>#include <mrpt/utils/mrpt_macros.h>#include <mrpt/base/link_pragmas.h>#include <mrpt/config.h>
Include dependency graph for fresnel.h:
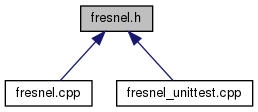
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::math | |
| This base provides a set of functions for maths stuff. | |
Functions | |
| double BASE_IMPEXP | mrpt::math::fresnel_sin_integral (double x) MRPT_NO_THROWS |
| Evaluates the integral from 0 to x of sqrt(2/pi) sin(t^2) dt. More... | |
| double BASE_IMPEXP | mrpt::math::fresnel_cos_integral (double x) MRPT_NO_THROWS |
| Evaluates the integral from 0 to x of sqrt(2/pi) cos(t^2) dt. More... | |