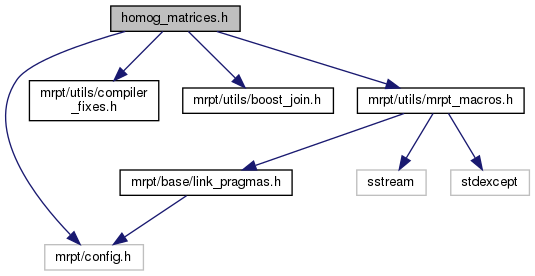
#include <mrpt/config.h>#include <mrpt/utils/compiler_fixes.h>#include <mrpt/utils/boost_join.h>#include <mrpt/utils/mrpt_macros.h>
Include dependency graph for homog_matrices.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::math | |
| This base provides a set of functions for maths stuff. | |
Functions | |
| template<class MATRIXLIKE1 , class MATRIXLIKE2 > | |
| void | mrpt::math::homogeneousMatrixInverse (const MATRIXLIKE1 &M, MATRIXLIKE2 &out_inverse_M) |
| Efficiently compute the inverse of a 4x4 homogeneous matrix by only transposing the rotation 3x3 part and solving the translation with dot products. More... | |
| template<class IN_ROTMATRIX , class IN_XYZ , class OUT_ROTMATRIX , class OUT_XYZ > | |
| void | mrpt::math::homogeneousMatrixInverse (const IN_ROTMATRIX &in_R, const IN_XYZ &in_xyz, OUT_ROTMATRIX &out_R, OUT_XYZ &out_xyz) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| template<class MATRIXLIKE > | |
| void | mrpt::math::homogeneousMatrixInverse (MATRIXLIKE &M) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |