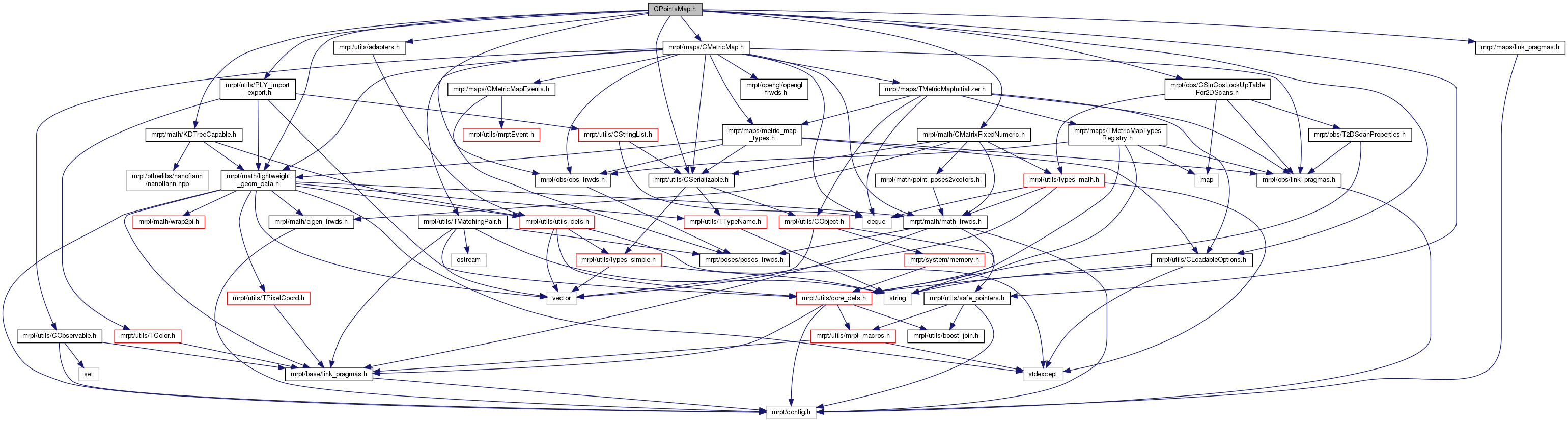
#include <mrpt/maps/CMetricMap.h>#include <mrpt/utils/CSerializable.h>#include <mrpt/utils/CLoadableOptions.h>#include <mrpt/utils/safe_pointers.h>#include <mrpt/math/KDTreeCapable.h>#include <mrpt/obs/CSinCosLookUpTableFor2DScans.h>#include <mrpt/math/lightweight_geom_data.h>#include <mrpt/math/CMatrixFixedNumeric.h>#include <mrpt/utils/PLY_import_export.h>#include <mrpt/obs/obs_frwds.h>#include <mrpt/maps/link_pragmas.h>#include <mrpt/utils/adapters.h>
Include dependency graph for maps/CPointsMap.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | mrpt::maps::CPointsMap |
| A cloud of points in 2D or 3D, which can be built from a sequence of laser scans or other sensors. More... | |
| struct | mrpt::maps::CPointsMap::TLaserRange2DInsertContext |
| Helper struct used for internal_loadFromRangeScan2D_prepareOneRange() More... | |
| struct | mrpt::maps::CPointsMap::TLaserRange3DInsertContext |
| Helper struct used for internal_loadFromRangeScan3D_prepareOneRange() More... | |
| struct | mrpt::maps::CPointsMap::TInsertionOptions |
| With this struct options are provided to the observation insertion process. More... | |
| struct | mrpt::maps::CPointsMap::TLikelihoodOptions |
| Options used when evaluating "computeObservationLikelihood" in the derived classes. More... | |
| class | mrpt::utils::PointCloudAdapter< mrpt::maps::CPointsMap > |
| Specialization mrpt::utils::PointCloudAdapter<mrpt::maps::CPointsMap> More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::maps | |
| mrpt::maps::detail | |
| mrpt::global_settings | |
| Global variables to change the run-time behaviour of some MRPT classes within mrpt-base. | |
| mrpt::utils | |
| Classes for serialization, sockets, ini-file manipulation, streams, list of properties-values, timewatch, extensions to STL. | |
Functions | |
| ::mrpt::utils::CStream & | mrpt::maps::operator>> (mrpt::utils::CStream &in, CPointsMapPtr &pObj) |
Variables | |
| MAPS_IMPEXP float | mrpt::global_settings::POINTSMAPS_3DOBJECT_POINTSIZE = 3.0f |
| The size of points when exporting with getAs3DObject() (default=3.0) Affects to: More... | |