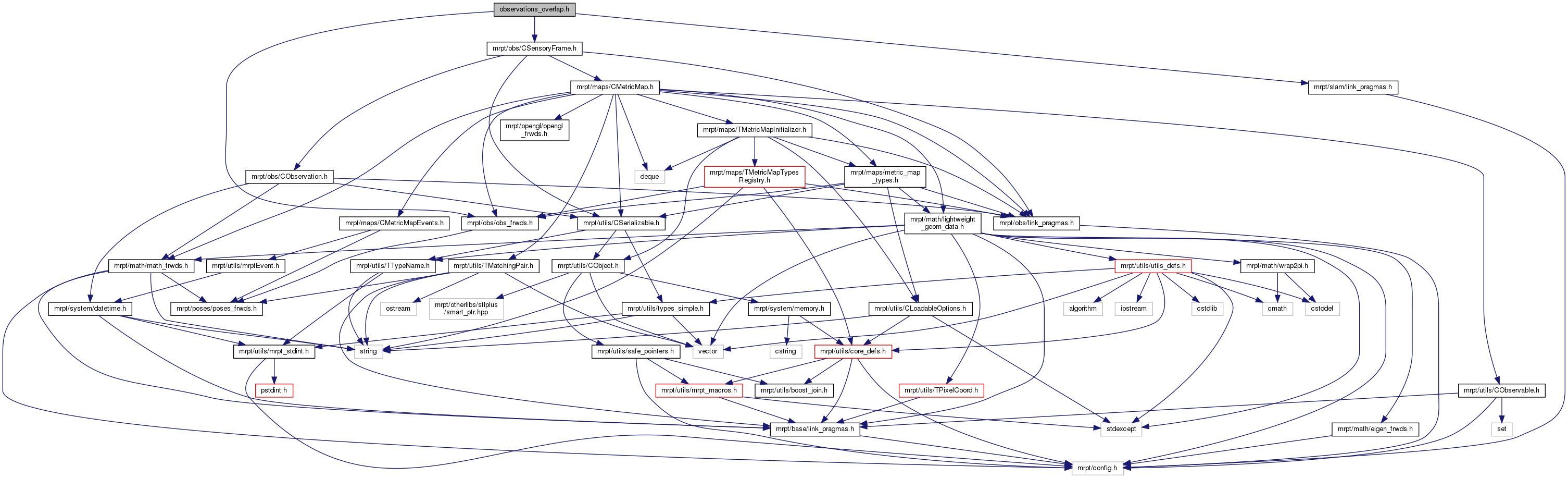
#include <mrpt/obs/obs_frwds.h>#include <mrpt/obs/CSensoryFrame.h>#include <mrpt/slam/link_pragmas.h>
Include dependency graph for observations_overlap.h:
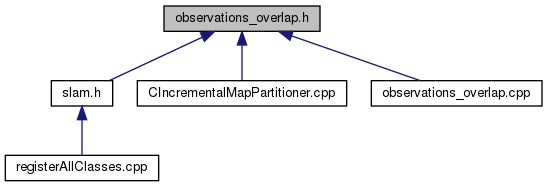
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::slam | |
Functions | |
Observations overlap functions | |
| |
| double SLAM_IMPEXP | mrpt::slam::observationsOverlap (const mrpt::obs::CObservation *o1, const mrpt::obs::CObservation *o2, const mrpt::poses::CPose3D *pose_o2_wrt_o1=NULL) |
| Estimates the "overlap" or "matching ratio" of two observations (range [0,1]), possibly taking into account their relative positions. More... | |
| double | mrpt::slam::observationsOverlap (const mrpt::obs::CObservationPtr &o1, const mrpt::obs::CObservationPtr &o2, const mrpt::poses::CPose3D *pose_o2_wrt_o1=NULL) |
| Estimates the "overlap" or "matching ratio" of two observations (range [0,1]), possibly taking into account their relative positions. More... | |
| double SLAM_IMPEXP | mrpt::slam::observationsOverlap (const mrpt::obs::CSensoryFrame &sf1, const mrpt::obs::CSensoryFrame &sf2, const mrpt::poses::CPose3D *pose_sf2_wrt_sf1=NULL) |
| Estimates the "overlap" or "matching ratio" of two set of observations (range [0,1]), possibly taking into account their relative positions. More... | |
| double | mrpt::slam::observationsOverlap (const mrpt::obs::CSensoryFramePtr &sf1, const mrpt::obs::CSensoryFramePtr &sf2, const mrpt::poses::CPose3D *pose_sf2_wrt_sf1=NULL) |
| Estimates the "overlap" or "matching ratio" of two set of observations (range [0,1]), possibly taking into account their relative positions. More... | |