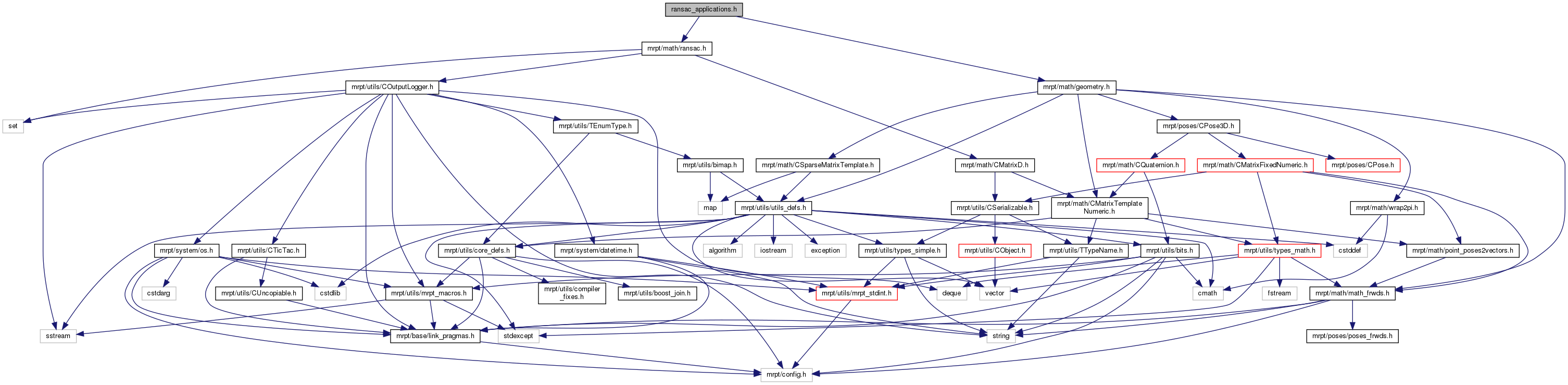
Include dependency graph for ransac_applications.h:
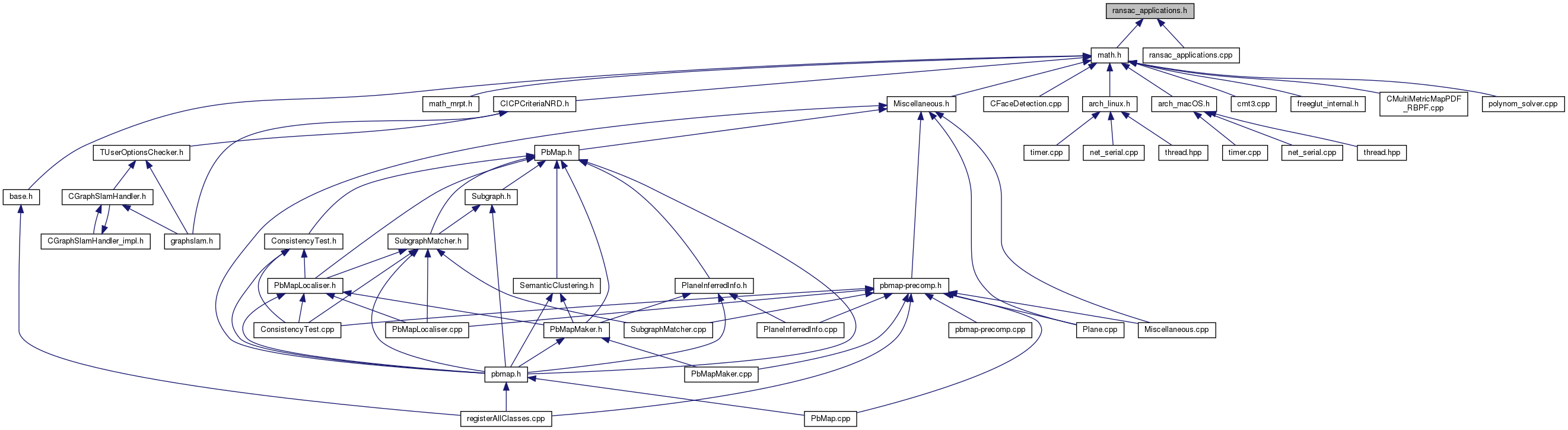
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::math | |
| This base provides a set of functions for maths stuff. | |
Functions | |
RANSAC detectors | |
| template<typename NUMTYPE > | |
| void BASE_IMPEXP | mrpt::math::ransac_detect_3D_planes (const Eigen::Matrix< NUMTYPE, Eigen::Dynamic, 1 > &x, const Eigen::Matrix< NUMTYPE, Eigen::Dynamic, 1 > &y, const Eigen::Matrix< NUMTYPE, Eigen::Dynamic, 1 > &z, std::vector< std::pair< size_t, TPlane > > &out_detected_planes, const double threshold, const size_t min_inliers_for_valid_plane=10) |
| Fit a number of 3-D planes to a given point cloud, automatically determining the number of existing planes by means of the provided threshold and minimum number of supporting inliers. More... | |
| template<typename NUMTYPE > | |
| void BASE_IMPEXP | mrpt::math::ransac_detect_2D_lines (const Eigen::Matrix< NUMTYPE, Eigen::Dynamic, 1 > &x, const Eigen::Matrix< NUMTYPE, Eigen::Dynamic, 1 > &y, std::vector< std::pair< size_t, TLine2D > > &out_detected_lines, const double threshold, const size_t min_inliers_for_valid_line=5) |
| Fit a number of 2-D lines to a given point cloud, automatically determining the number of existing lines by means of the provided threshold and minimum number of supporting inliers. More... | |
| template<class POINTSMAP > | |
| void | mrpt::math::ransac_detect_3D_planes (const POINTSMAP *points_map, std::vector< std::pair< size_t, TPlane > > &out_detected_planes, const double threshold, const size_t min_inliers_for_valid_plane) |
| A stub for ransac_detect_3D_planes() with the points given as a mrpt::maps::CPointsMap. More... | |