Detailed Description
Parameters related with inserting observations into the map.
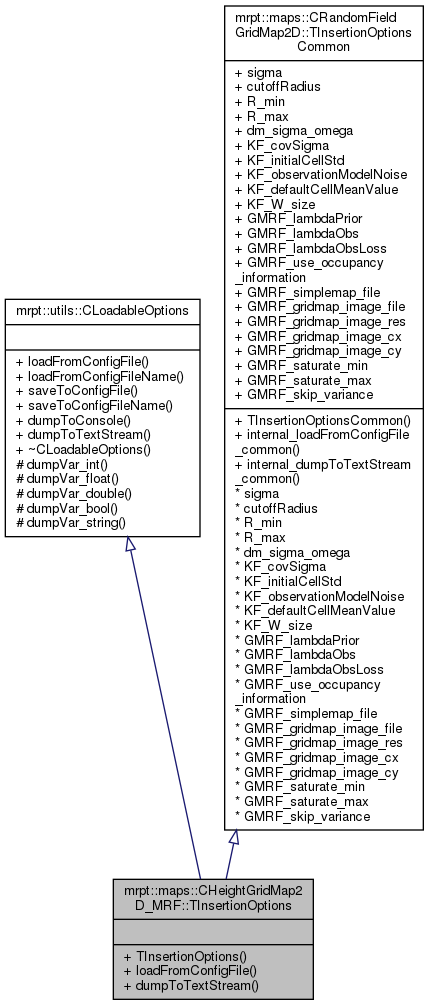
Definition at line 48 of file CHeightGridMap2D_MRF.h.
#include <mrpt/maps/CHeightGridMap2D_MRF.h>
Public Member Functions | |
| TInsertionOptions () | |
| Default values loader. More... | |
| void | loadFromConfigFile (const mrpt::utils::CConfigFileBase &source, const std::string §ion) MRPT_OVERRIDE |
| This method load the options from a ".ini"-like file or memory-stored string list. More... | |
| void | dumpToTextStream (mrpt::utils::CStream &out) const MRPT_OVERRIDE |
| This method should clearly display all the contents of the structure in textual form, sending it to a CStream. More... | |
| void | loadFromConfigFileName (const std::string &config_file, const std::string §ion) |
| Behaves like loadFromConfigFile, but you can pass directly a file name and a temporary CConfigFile object will be created automatically to load the file. More... | |
| virtual void | saveToConfigFile (mrpt::utils::CConfigFileBase &target, const std::string §ion) const |
| This method saves the options to a ".ini"-like file or memory-stored string list. More... | |
| void | saveToConfigFileName (const std::string &config_file, const std::string §ion) const |
| Behaves like saveToConfigFile, but you can pass directly a file name and a temporary CConfigFile object will be created automatically to save the file. More... | |
| void | dumpToConsole () const |
| Just like dumpToTextStream() but sending the text to the console (std::cout) More... | |
| void | internal_loadFromConfigFile_common (const mrpt::utils::CConfigFileBase &source, const std::string §ion) |
| See utils::CLoadableOptions. More... | |
| void | internal_dumpToTextStream_common (mrpt::utils::CStream &out) const |
| See utils::CLoadableOptions. More... | |
Public Attributes | |
Kernel methods (mrKernelDM, mrKernelDMV) | |
| float | sigma |
| The sigma of the "Parzen"-kernel Gaussian. More... | |
| float | cutoffRadius |
| The cutoff radius for updating cells. More... | |
| float | R_min |
| float | R_max |
| Limits for normalization of sensor readings. More... | |
| double | dm_sigma_omega |
| [DM/DM+V methods] The scaling parameter for the confidence "alpha" values (see the IROS 2009 paper; see CRandomFieldGridMap2D) */ More... | |
Kalman-filter methods (mrKalmanFilter, mrKalmanApproximate) | |
| float | KF_covSigma |
| The "sigma" for the initial covariance value between cells (in meters). More... | |
| float | KF_initialCellStd |
| The initial standard deviation of each cell's concentration (will be stored both at each cell's structure and in the covariance matrix as variances in the diagonal) (in normalized concentration units). More... | |
| float | KF_observationModelNoise |
| The sensor model noise (in normalized concentration units). More... | |
| float | KF_defaultCellMeanValue |
| The default value for the mean of cells' concentration. More... | |
| uint16_t | KF_W_size |
| [mrKalmanApproximate] The size of the window of neighbor cells. More... | |
Gaussian Markov Random Fields methods (mrGMRF_SD) | |
| double | GMRF_lambdaPrior |
| The information (Lambda) of fixed map constraints. More... | |
| double | GMRF_lambdaObs |
| The initial information (Lambda) of each observation (this information will decrease with time) More... | |
| double | GMRF_lambdaObsLoss |
| The loss of information of the observations with each iteration. More... | |
| bool | GMRF_use_occupancy_information |
| whether to use information of an occupancy_gridmap map for building the GMRF More... | |
| std::string | GMRF_simplemap_file |
| simplemap_file name of the occupancy_gridmap More... | |
| std::string | GMRF_gridmap_image_file |
| image name of the occupancy_gridmap More... | |
| double | GMRF_gridmap_image_res |
| occupancy_gridmap resolution: size of each pixel (m) More... | |
| size_t | GMRF_gridmap_image_cx |
| Pixel coordinates of the origin for the occupancy_gridmap. More... | |
| size_t | GMRF_gridmap_image_cy |
| Pixel coordinates of the origin for the occupancy_gridmap. More... | |
| double | GMRF_saturate_min |
| double | GMRF_saturate_max |
| (Default:-inf,+inf) Saturate the estimated mean in these limits More... | |
| bool | GMRF_skip_variance |
| (Default:false) Skip the computation of the variance, just compute the mean More... | |
Static Protected Member Functions | |
| static void | dumpVar_int (CStream &out, const char *varName, int v) |
| Used to print variable info from dumpToTextStream with the macro LOADABLEOPTS_DUMP_VAR. More... | |
| static void | dumpVar_float (CStream &out, const char *varName, float v) |
| static void | dumpVar_double (CStream &out, const char *varName, double v) |
| static void | dumpVar_bool (CStream &out, const char *varName, bool v) |
| static void | dumpVar_string (CStream &out, const char *varName, const std::string &v) |
Constructor & Destructor Documentation
◆ TInsertionOptions()
| CHeightGridMap2D_MRF::TInsertionOptions::TInsertionOptions | ( | ) |
Default values loader.
Definition at line 270 of file CHeightGridMap2D_MRF.cpp.
Member Function Documentation
◆ dumpToConsole()
|
inherited |
Just like dumpToTextStream() but sending the text to the console (std::cout)
Definition at line 47 of file CLoadableOptions.cpp.
References mrpt::utils::CLoadableOptions::dumpToTextStream(), and loadable_opts_my_cout.
Referenced by mrpt::hmtslam::CTopLCDetector_GridMatching::computeTopologicalObservationModel(), mrpt::hmtslam::CHMTSLAM::loadOptions(), and mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::printParams().
◆ dumpToTextStream()
|
virtual |
This method should clearly display all the contents of the structure in textual form, sending it to a CStream.
The default implementation in this base class relies on saveToConfigFile() to generate a plain text representation of all the parameters.
Reimplemented from mrpt::utils::CLoadableOptions.
Definition at line 277 of file CHeightGridMap2D_MRF.cpp.
References mrpt::utils::CStream::printf().
◆ dumpVar_bool()
|
staticprotectedinherited |
Definition at line 67 of file CLoadableOptions.cpp.
References LOADABLEOPTS_COLUMN_WIDTH, and mrpt::utils::CStream::printf().
◆ dumpVar_double()
|
staticprotectedinherited |
Definition at line 62 of file CLoadableOptions.cpp.
References LOADABLEOPTS_COLUMN_WIDTH, and mrpt::utils::CStream::printf().
◆ dumpVar_float()
|
staticprotectedinherited |
Definition at line 57 of file CLoadableOptions.cpp.
References LOADABLEOPTS_COLUMN_WIDTH, and mrpt::utils::CStream::printf().
◆ dumpVar_int()
|
staticprotectedinherited |
Used to print variable info from dumpToTextStream with the macro LOADABLEOPTS_DUMP_VAR.
Definition at line 52 of file CLoadableOptions.cpp.
References LOADABLEOPTS_COLUMN_WIDTH, and mrpt::utils::CStream::printf().
◆ dumpVar_string()
|
staticprotectedinherited |
Definition at line 72 of file CLoadableOptions.cpp.
References LOADABLEOPTS_COLUMN_WIDTH, and mrpt::utils::CStream::printf().
◆ internal_dumpToTextStream_common()
|
inherited |
Definition at line 598 of file CRandomFieldGridMap2D.cpp.
References mrpt::utils::CStream::printf().
◆ internal_loadFromConfigFile_common()
|
inherited |
Definition at line 627 of file CRandomFieldGridMap2D.cpp.
References MRPT_LOAD_CONFIG_VAR, mrpt::utils::CConfigFileBase::read_bool(), mrpt::utils::CConfigFileBase::read_float(), mrpt::utils::CConfigFileBase::read_int(), and mrpt::utils::CConfigFileBase::read_string().
◆ loadFromConfigFile()
|
virtual |
This method load the options from a ".ini"-like file or memory-stored string list.
Only those parameters found in the given "section" and having the same name that the variable are loaded. Those not found in the file will stay with their previous values (usually the default values loaded at initialization). An example of an ".ini" file:
- See also
- loadFromConfigFileName, saveToConfigFile
Implements mrpt::utils::CLoadableOptions.
Definition at line 292 of file CHeightGridMap2D_MRF.cpp.
◆ loadFromConfigFileName()
|
inherited |
Behaves like loadFromConfigFile, but you can pass directly a file name and a temporary CConfigFile object will be created automatically to load the file.
- See also
- loadFromConfigFile
Definition at line 23 of file CLoadableOptions.cpp.
References mrpt::utils::CLoadableOptions::loadFromConfigFile().
Referenced by mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::loadParams().
◆ saveToConfigFile()
|
virtualinherited |
This method saves the options to a ".ini"-like file or memory-stored string list.
- See also
- loadFromConfigFile, saveToConfigFileName
Reimplemented in mrpt::vision::TMultiResDescOptions, mrpt::vision::TMultiResDescMatchOptions, mrpt::nav::CPTG_RobotShape_Circular, mrpt::nav::CPTG_RobotShape_Polygonal, mrpt::nav::CParameterizedTrajectoryGenerator, mrpt::nav::CAbstractPTGBasedReactive::TAbstractPTGNavigatorParams, mrpt::nav::CAbstractNavigator::TAbstractNavigatorParams, mrpt::nav::CPTG_DiffDrive_CollisionGridBased, mrpt::nav::CHolonomicND::TOptions, mrpt::nav::CWaypointsNavigator::TWaypointsNavigatorParams, mrpt::nav::CHolonomicFullEval::TOptions, mrpt::nav::CReactiveNavigationSystem::TReactiveNavigatorParams, mrpt::nav::CHolonomicVFF::TOptions, mrpt::nav::CMultiObjectiveMotionOptimizerBase::TParamsBase, mrpt::maps::CPointCloudFilterByDistance::TOptions, mrpt::nav::CPTG_DiffDrive_C, mrpt::nav::CPTG_DiffDrive_alpha, mrpt::nav::CMultiObjMotionOpt_Scalarization::TParams, mrpt::nav::CPTG_DiffDrive_CC, mrpt::nav::CPTG_DiffDrive_CCS, mrpt::nav::CPTG_DiffDrive_CS, and mrpt::nav::CPTG_Holo_Blend.
Definition at line 31 of file CLoadableOptions.cpp.
References MRPT_UNUSED_PARAM.
Referenced by mrpt::utils::CLoadableOptions::dumpToTextStream(), and mrpt::utils::CLoadableOptions::saveToConfigFileName().
◆ saveToConfigFileName()
|
inherited |
Behaves like saveToConfigFile, but you can pass directly a file name and a temporary CConfigFile object will be created automatically to save the file.
- See also
- saveToConfigFile, loadFromConfigFileName
Definition at line 39 of file CLoadableOptions.cpp.
References mrpt::utils::CLoadableOptions::saveToConfigFile().
Member Data Documentation
◆ cutoffRadius
|
inherited |
The cutoff radius for updating cells.
Definition at line 200 of file maps/CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CGasConcentrationGridMap2D::readFromStream(), and mrpt::maps::CGasConcentrationGridMap2D::writeToStream().
◆ dm_sigma_omega
|
inherited |
[DM/DM+V methods] The scaling parameter for the confidence "alpha" values (see the IROS 2009 paper; see CRandomFieldGridMap2D) */
Definition at line 202 of file maps/CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CRandomFieldGridMap2D::computeConfidenceCellValue_DM_DMV(), mrpt::maps::CRandomFieldGridMap2D::computeMeanCellValue_DM_DMV(), and mrpt::maps::CRandomFieldGridMap2D::computeVarCellValue_DM_DMV().
◆ GMRF_gridmap_image_cx
|
inherited |
Pixel coordinates of the origin for the occupancy_gridmap.
Definition at line 224 of file maps/CRandomFieldGridMap2D.h.
◆ GMRF_gridmap_image_cy
|
inherited |
Pixel coordinates of the origin for the occupancy_gridmap.
Definition at line 225 of file maps/CRandomFieldGridMap2D.h.
◆ GMRF_gridmap_image_file
|
inherited |
image name of the occupancy_gridmap
Definition at line 222 of file maps/CRandomFieldGridMap2D.h.
◆ GMRF_gridmap_image_res
|
inherited |
occupancy_gridmap resolution: size of each pixel (m)
Definition at line 223 of file maps/CRandomFieldGridMap2D.h.
◆ GMRF_lambdaObs
|
inherited |
The initial information (Lambda) of each observation (this information will decrease with time)
Definition at line 217 of file maps/CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CRandomFieldGridMap2D::insertIndividualReading().
◆ GMRF_lambdaObsLoss
|
inherited |
The loss of information of the observations with each iteration.
Definition at line 218 of file maps/CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CGasConcentrationGridMap2D::CGasConcentrationGridMap2D(), and mrpt::maps::CRandomFieldGridMap2D::updateMapEstimation_GMRF().
◆ GMRF_lambdaPrior
|
inherited |
The information (Lambda) of fixed map constraints.
Definition at line 216 of file maps/CRandomFieldGridMap2D.h.
◆ GMRF_saturate_max
|
inherited |
(Default:-inf,+inf) Saturate the estimated mean in these limits
Definition at line 227 of file maps/CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CGasConcentrationGridMap2D::CGasConcentrationGridMap2D(), mrpt::maps::CRandomFieldGridMap2D::getAs3DObject(), mrpt::maps::CRandomFieldGridMap2D::getAsMatrix(), mrpt::maps::CRandomFieldGridMap2D::saveAsMatlab3DGraph(), and mrpt::maps::CRandomFieldGridMap2D::updateMapEstimation_GMRF().
◆ GMRF_saturate_min
|
inherited |
Definition at line 227 of file maps/CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CGasConcentrationGridMap2D::CGasConcentrationGridMap2D(), mrpt::maps::CRandomFieldGridMap2D::getAs3DObject(), mrpt::maps::CRandomFieldGridMap2D::getAsMatrix(), mrpt::maps::CRandomFieldGridMap2D::saveAsMatlab3DGraph(), and mrpt::maps::CRandomFieldGridMap2D::updateMapEstimation_GMRF().
◆ GMRF_simplemap_file
|
inherited |
simplemap_file name of the occupancy_gridmap
Definition at line 221 of file maps/CRandomFieldGridMap2D.h.
◆ GMRF_skip_variance
|
inherited |
(Default:false) Skip the computation of the variance, just compute the mean
Definition at line 228 of file maps/CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CRandomFieldGridMap2D::updateMapEstimation_GMRF().
◆ GMRF_use_occupancy_information
|
inherited |
whether to use information of an occupancy_gridmap map for building the GMRF
Definition at line 220 of file maps/CRandomFieldGridMap2D.h.
◆ KF_covSigma
|
inherited |
The "sigma" for the initial covariance value between cells (in meters).
Definition at line 207 of file maps/CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CRandomFieldGridMap2D::insertObservation_KF2(), mrpt::maps::CGasConcentrationGridMap2D::readFromStream(), mrpt::maps::CRandomFieldGridMap2D::resize(), and mrpt::maps::CGasConcentrationGridMap2D::writeToStream().
◆ KF_defaultCellMeanValue
|
inherited |
The default value for the mean of cells' concentration.
Definition at line 210 of file maps/CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CRandomFieldGridMap2D::insertObservation_KF(), mrpt::maps::CRandomFieldGridMap2D::insertObservation_KF2(), mrpt::maps::CRandomFieldGridMap2D::predictMeasurement(), mrpt::maps::CGasConcentrationGridMap2D::readFromStream(), and mrpt::maps::CGasConcentrationGridMap2D::writeToStream().
◆ KF_initialCellStd
|
inherited |
The initial standard deviation of each cell's concentration (will be stored both at each cell's structure and in the covariance matrix as variances in the diagonal) (in normalized concentration units).
Definition at line 208 of file maps/CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CRandomFieldGridMap2D::insertObservation_KF(), mrpt::maps::CRandomFieldGridMap2D::predictMeasurement(), mrpt::maps::CGasConcentrationGridMap2D::readFromStream(), mrpt::maps::CRandomFieldGridMap2D::resize(), mrpt::maps::CGasConcentrationGridMap2D::simulateAdvection(), and mrpt::maps::CGasConcentrationGridMap2D::writeToStream().
◆ KF_observationModelNoise
|
inherited |
The sensor model noise (in normalized concentration units).
Definition at line 209 of file maps/CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CRandomFieldGridMap2D::insertObservation_KF(), mrpt::maps::CRandomFieldGridMap2D::insertObservation_KF2(), mrpt::maps::CRandomFieldGridMap2D::predictMeasurement(), mrpt::maps::CGasConcentrationGridMap2D::readFromStream(), and mrpt::maps::CGasConcentrationGridMap2D::writeToStream().
◆ KF_W_size
|
inherited |
[mrKalmanApproximate] The size of the window of neighbor cells.
Definition at line 211 of file maps/CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CRandomFieldGridMap2D::insertObservation_KF2(), mrpt::maps::CGasConcentrationGridMap2D::readFromStream(), mrpt::maps::CRandomFieldGridMap2D::resize(), and mrpt::maps::CGasConcentrationGridMap2D::writeToStream().
◆ R_max
|
inherited |
Limits for normalization of sensor readings.
Definition at line 201 of file maps/CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CGasConcentrationGridMap2D::internal_insertObservation(), mrpt::maps::CRandomFieldGridMap2D::predictMeasurement(), mrpt::maps::CGasConcentrationGridMap2D::readFromStream(), and mrpt::maps::CGasConcentrationGridMap2D::writeToStream().
◆ R_min
|
inherited |
Definition at line 201 of file maps/CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CGasConcentrationGridMap2D::internal_insertObservation(), mrpt::maps::CRandomFieldGridMap2D::predictMeasurement(), mrpt::maps::CGasConcentrationGridMap2D::readFromStream(), and mrpt::maps::CGasConcentrationGridMap2D::writeToStream().
◆ sigma
|
inherited |
The sigma of the "Parzen"-kernel Gaussian.
Definition at line 199 of file maps/CRandomFieldGridMap2D.h.
Referenced by mrpt::maps::CGasConcentrationGridMap2D::readFromStream(), and mrpt::maps::CGasConcentrationGridMap2D::writeToStream().