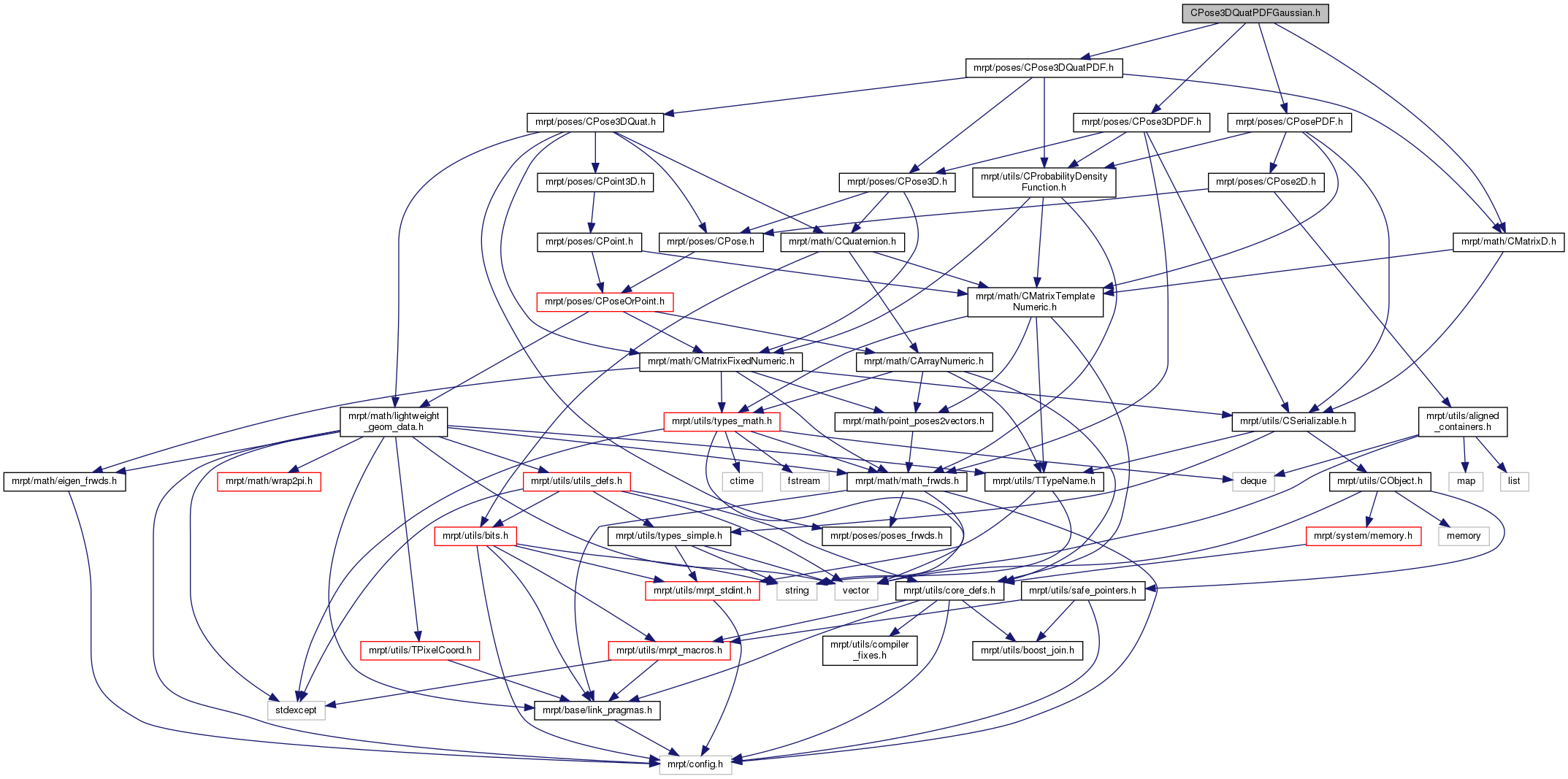
#include <mrpt/poses/CPose3DQuatPDF.h>#include <mrpt/poses/CPose3DPDF.h>#include <mrpt/poses/CPosePDF.h>#include <mrpt/math/CMatrixD.h>
Include dependency graph for CPose3DQuatPDFGaussian.h:
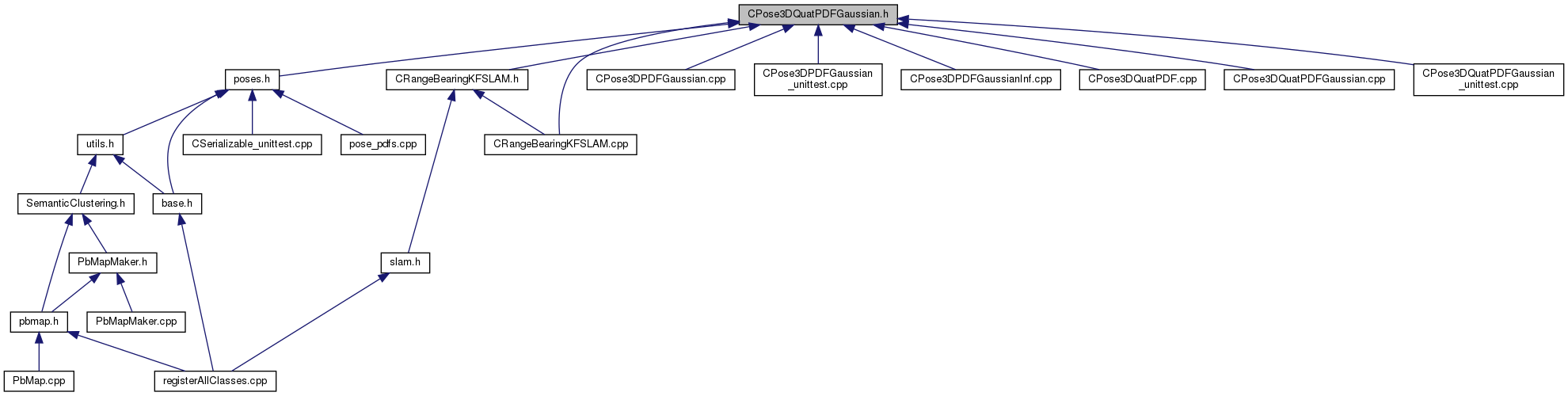
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mrpt::poses::CPose3DQuatPDFGaussian |
Declares a class that represents a Probability Density function (PDF) of a 3D pose using a quaternion ![$ p(\mathbf{x}) = [x ~ y ~ z ~ qr ~ qx ~ qy ~ qz]^\top $](form_66.png) . More... . More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::poses | |
| Classes for 2D/3D geometry representation, both of single values and probability density distributions (PDFs) in many forms. | |
| mrpt::global_settings | |
| Global variables to change the run-time behaviour of some MRPT classes within mrpt-base. | |
Functions | |
| ::mrpt::utils::CStream & | mrpt::poses::operator>> (mrpt::utils::CStream &in, CPose3DQuatPDFGaussianPtr &pObj) |
| bool BASE_IMPEXP | mrpt::poses::operator== (const CPose3DQuatPDFGaussian &p1, const CPose3DQuatPDFGaussian &p2) |
| CPose3DQuatPDFGaussian BASE_IMPEXP | mrpt::poses::operator+ (const CPose3DQuatPDFGaussian &x, const CPose3DQuatPDFGaussian &u) |
| Pose composition for two 3D pose Gaussians. More... | |
| CPose3DQuatPDFGaussian BASE_IMPEXP | mrpt::poses::operator- (const CPose3DQuatPDFGaussian &x, const CPose3DQuatPDFGaussian &u) |
| Inverse pose composition for two 3D pose Gaussians. More... | |
| std::ostream BASE_IMPEXP & | mrpt::poses::operator<< (std::ostream &out, const CPose3DQuatPDFGaussian &obj) |
| Dumps the mean and covariance matrix to a text stream. More... | |
Variables | |
| BASE_IMPEXP bool | mrpt::global_settings::USE_SUT_EULER2QUAT_CONVERSION = false |
| If set to true (default), a Scaled Unscented Transform is used instead of a linear approximation with Jacobians. More... | |