#include <mrpt/utils/utils_defs.h>#include <mrpt/bayes/CProbabilityParticle.h>#include <mrpt/random.h>
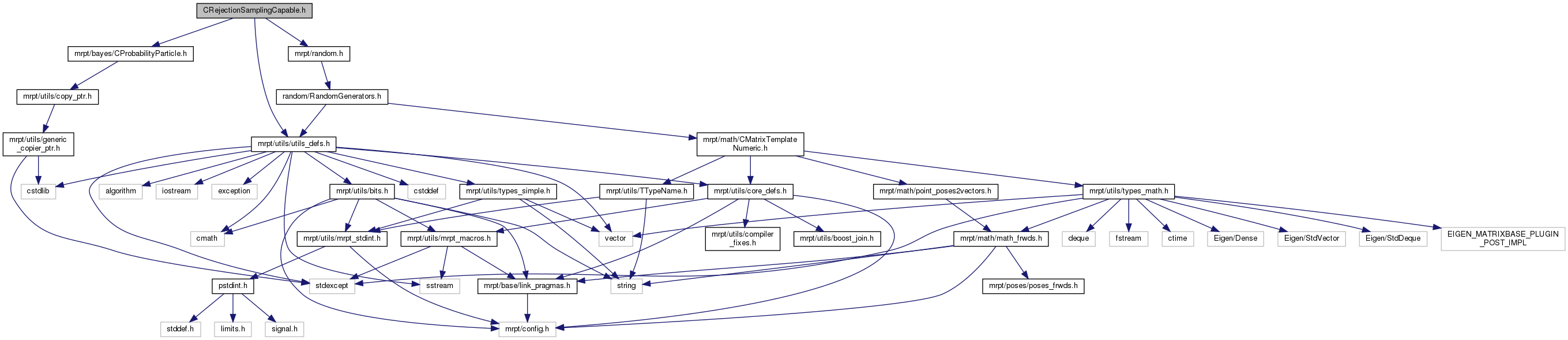
Include dependency graph for CRejectionSamplingCapable.h:
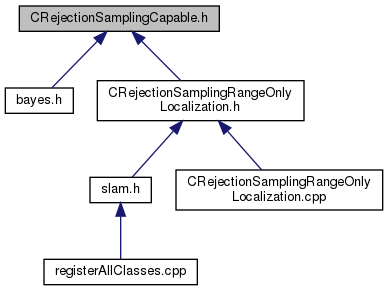
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mrpt::bayes::CRejectionSamplingCapable< TStateSpace > |
| A base class for implementing rejection sampling in a generic state space. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::bayes | |
| The namespace for Bayesian filtering algorithm: different particle filters and Kalman filter algorithms. | |