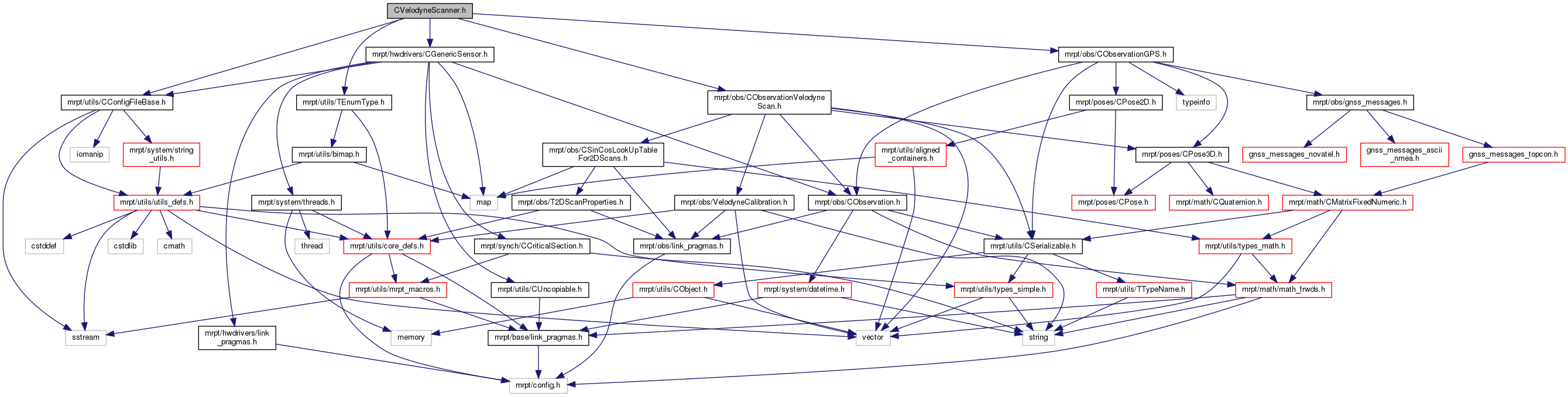
#include <mrpt/hwdrivers/CGenericSensor.h>#include <mrpt/obs/CObservationVelodyneScan.h>#include <mrpt/obs/CObservationGPS.h>#include <mrpt/utils/CConfigFileBase.h>#include <mrpt/utils/TEnumType.h>
Include dependency graph for CVelodyneScanner.h:
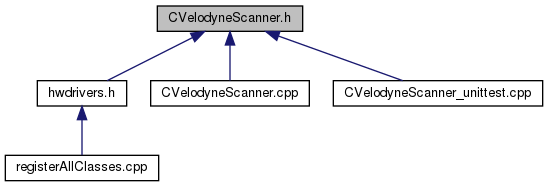
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mrpt::hwdrivers::CVelodyneScanner |
| A C++ interface to Velodyne laser scanners (HDL-64, HDL-32, VLP-16), working on Linux and Windows. More... | |
| struct | mrpt::hwdrivers::CVelodyneScanner::TModelProperties |
| Hard-wired properties of LIDARs depending on the model. More... | |
| struct | mrpt::hwdrivers::CVelodyneScanner::TModelPropertiesFactory |
| Access to default sets of parameters for Velodyne LIDARs. More... | |
| struct | mrpt::utils::TEnumTypeFiller< hwdrivers::CVelodyneScanner::model_t > |
| struct | mrpt::utils::TEnumTypeFiller< hwdrivers::CVelodyneScanner::return_type_t > |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::hwdrivers | |
| Contains classes for various device interfaces. | |
| mrpt::utils | |
| Classes for serialization, sockets, ini-file manipulation, streams, list of properties-values, timewatch, extensions to STL. | |