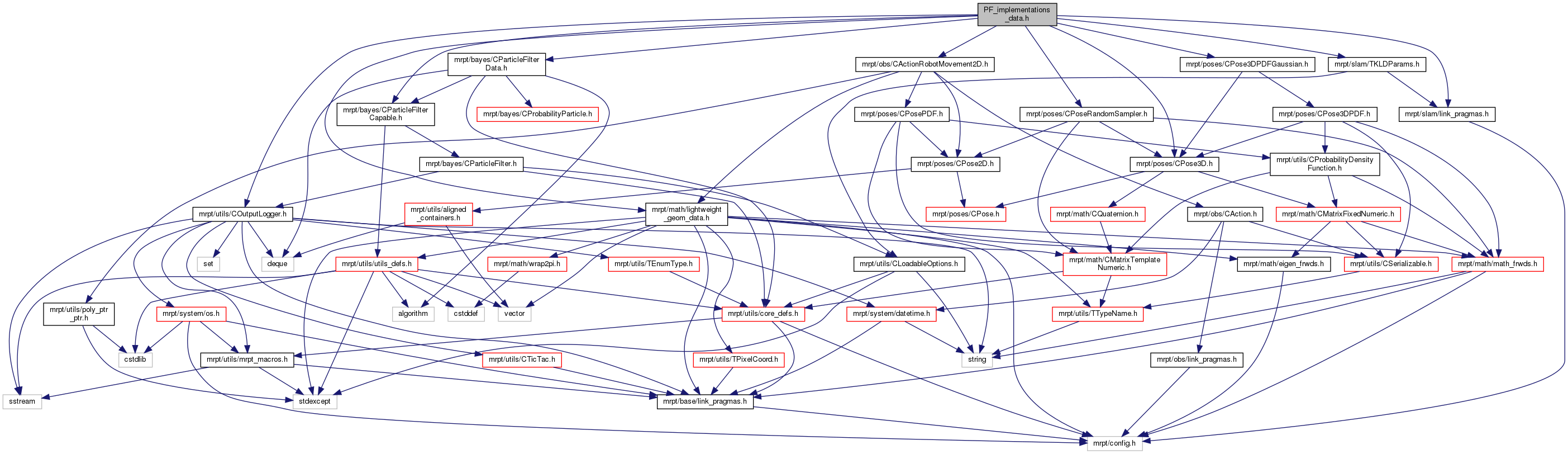
#include <mrpt/obs/CActionRobotMovement2D.h>#include <mrpt/bayes/CParticleFilterCapable.h>#include <mrpt/bayes/CParticleFilterData.h>#include <mrpt/math/lightweight_geom_data.h>#include <mrpt/poses/CPose3D.h>#include <mrpt/poses/CPose3DPDFGaussian.h>#include <mrpt/poses/CPoseRandomSampler.h>#include <mrpt/slam/TKLDParams.h>#include <mrpt/utils/COutputLogger.h>#include <mrpt/slam/link_pragmas.h>
Include dependency graph for PF_implementations_data.h:
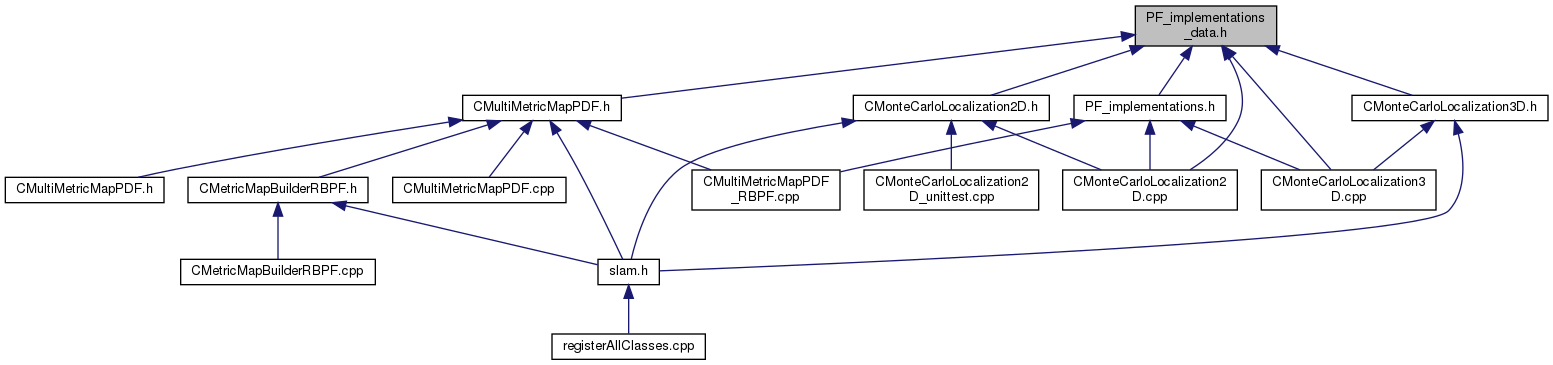
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mrpt::slam::PF_implementation< PARTICLE_TYPE, MYSELF > |
| A set of common data shared by PF implementations for both SLAM and localization. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::slam | |
Functions | |
| template<class PARTICLETYPE , class BINTYPE > | |
| void | mrpt::slam::KLF_loadBinFromParticle (BINTYPE &outBin, const TKLDParams &opts, const PARTICLETYPE *currentParticleValue=NULL, const mrpt::math::TPose3D *newPoseToBeInserted=NULL) |