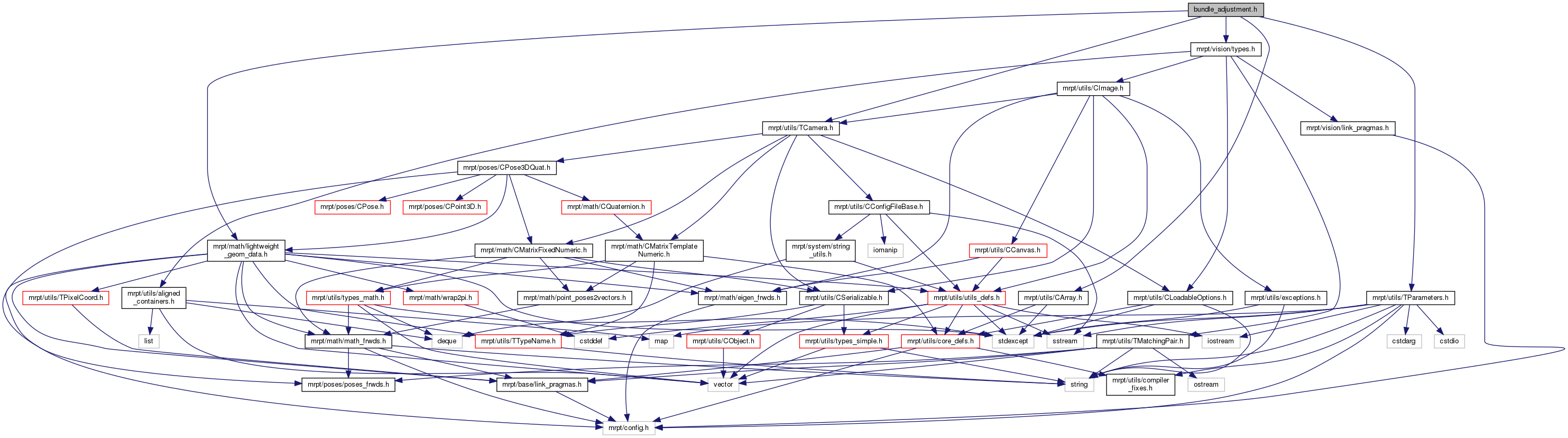
#include <mrpt/vision/types.h>#include <mrpt/utils/TCamera.h>#include <mrpt/utils/TParameters.h>#include <mrpt/math/lightweight_geom_data.h>#include <mrpt/utils/CArray.h>
Include dependency graph for bundle_adjustment.h:
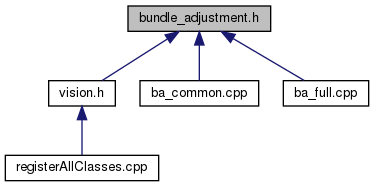
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::vision | |
| Classes for computer vision, detectors, features, etc. | |
Functions | |
Bundle-Adjustment Auxiliary methods | |
| void VISION_IMPEXP | mrpt::vision::ba_initial_estimate (const mrpt::vision::TSequenceFeatureObservations &observations, const mrpt::utils::TCamera &camera_params, mrpt::vision::TFramePosesVec &frame_poses, mrpt::vision::TLandmarkLocationsVec &landmark_points) |
| Fills the frames & landmark points maps with an initial gross estimate from the sequence observations, so they can be fed to bundle adjustment methods. More... | |
| void VISION_IMPEXP | mrpt::vision::ba_initial_estimate (const mrpt::vision::TSequenceFeatureObservations &observations, const mrpt::utils::TCamera &camera_params, mrpt::vision::TFramePosesMap &frame_poses, mrpt::vision::TLandmarkLocationsMap &landmark_points) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| double VISION_IMPEXP | mrpt::vision::reprojectionResiduals (const mrpt::vision::TSequenceFeatureObservations &observations, const mrpt::utils::TCamera &camera_params, const mrpt::vision::TFramePosesVec &frame_poses, const mrpt::vision::TLandmarkLocationsVec &landmark_points, std::vector< mrpt::utils::CArray< double, 2 > > &out_residuals, const bool frame_poses_are_inverse, const bool use_robust_kernel=true, const double kernel_param=3.0, std::vector< double > *out_kernel_1st_deriv=NULL) |
| Compute reprojection error vector (used from within Bundle Adjustment methods, but can be used in general) See mrpt::vision::bundle_adj_full for a description of most parameters. More... | |
| double VISION_IMPEXP | mrpt::vision::reprojectionResiduals (const mrpt::vision::TSequenceFeatureObservations &observations, const mrpt::utils::TCamera &camera_params, const mrpt::vision::TFramePosesMap &frame_poses, const mrpt::vision::TLandmarkLocationsMap &landmark_points, std::vector< mrpt::utils::CArray< double, 2 > > &out_residuals, const bool frame_poses_are_inverse, const bool use_robust_kernel=true, const double kernel_param=3.0, std::vector< double > *out_kernel_1st_deriv=NULL) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| void VISION_IMPEXP | mrpt::vision::add_se3_deltas_to_frames (const mrpt::vision::TFramePosesVec &frame_poses, const mrpt::math::CVectorDouble &delta, const size_t delta_first_idx, const size_t delta_num_vals, mrpt::vision::TFramePosesVec &new_frame_poses, const size_t num_fix_frames) |
| For each pose in the vector frame_poses, adds a "delta" increment to the manifold, with the "delta" given in the se(3) Lie algebra: More... | |
| void VISION_IMPEXP | mrpt::vision::add_3d_deltas_to_points (const mrpt::vision::TLandmarkLocationsVec &landmark_points, const mrpt::math::CVectorDouble &delta, const size_t delta_first_idx, const size_t delta_num_vals, mrpt::vision::TLandmarkLocationsVec &new_landmark_points, const size_t num_fix_points) |
| For each pose in the vector frame_poses, adds a "delta" increment to the manifold, with the "delta" given in the se(3) Lie algebra: More... | |
Bundle-Adjustment methods | |
| typedef void(* | mrpt::vision::TBundleAdjustmentFeedbackFunctor) (const size_t cur_iter, const double cur_total_sq_error, const size_t max_iters, const mrpt::vision::TSequenceFeatureObservations &input_observations, const mrpt::vision::TFramePosesVec ¤t_frame_estimate, const mrpt::vision::TLandmarkLocationsVec ¤t_landmark_estimate) |
| A functor type for BA methods. More... | |
| double VISION_IMPEXP | mrpt::vision::bundle_adj_full (const mrpt::vision::TSequenceFeatureObservations &observations, const mrpt::utils::TCamera &camera_params, mrpt::vision::TFramePosesVec &frame_poses, mrpt::vision::TLandmarkLocationsVec &landmark_points, const mrpt::utils::TParametersDouble &extra_params=mrpt::utils::TParametersDouble(), const mrpt::vision::TBundleAdjustmentFeedbackFunctor user_feedback=NULL) |
| Sparse Levenberg-Marquart solution to bundle adjustment - optimizes all the camera frames & the landmark locations. More... | |