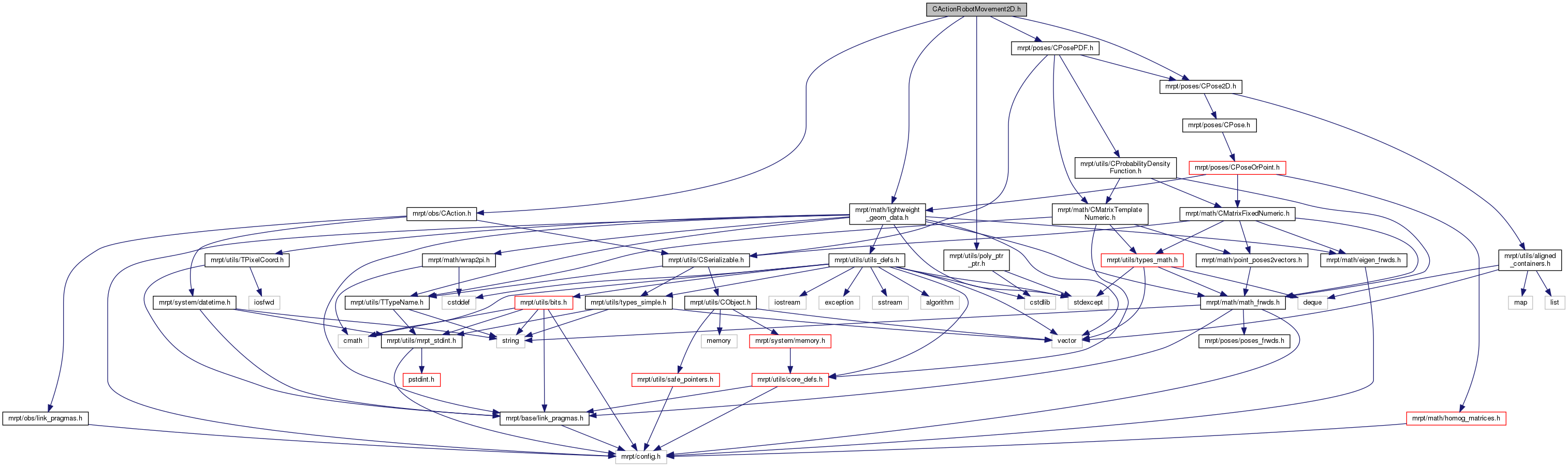
#include <mrpt/obs/CAction.h>#include <mrpt/poses/CPose2D.h>#include <mrpt/poses/CPosePDF.h>#include <mrpt/utils/poly_ptr_ptr.h>#include <mrpt/math/lightweight_geom_data.h>
Include dependency graph for obs/CActionRobotMovement2D.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | mrpt::obs::CActionRobotMovement2D |
| Represents a probabilistic 2D movement of the robot mobile base. More... | |
| struct | mrpt::obs::CActionRobotMovement2D::TMotionModelOptions |
| The parameter to be passed to "computeFromOdometry". More... | |
| struct | mrpt::obs::CActionRobotMovement2D::TMotionModelOptions::TOptions_GaussianModel |
| Options for the gaussian model, which generates a CPosePDFGaussian object in poseChange See docs in : http://www.mrpt.org/tutorials/programming/odometry-and-motion-models/probabilistic_motion_models/. More... | |
| struct | mrpt::obs::CActionRobotMovement2D::TMotionModelOptions::TOptions_ThrunModel |
| Options for the Thrun's model, which generates a CPosePDFParticles object in poseChange See docs in : http://www.mrpt.org/tutorials/programming/odometry-and-motion-models/probabilistic_motion_models/. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::obs | |
| This namespace contains representation of robot actions and observations. | |
Functions | |
| ::mrpt::utils::CStream & | mrpt::obs::operator>> (mrpt::utils::CStream &in, CActionRobotMovement2DPtr &pObj) |