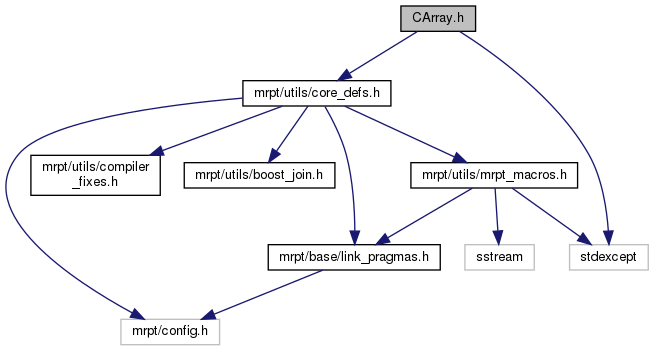
Include dependency graph for CArray.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | mrpt::utils::CArray< T, N > |
| A STL container (as wrapper) for arrays of constant size defined at compile time. More... | |
| class | mrpt::utils::CArray< T, 0 > |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::utils | |
| Classes for serialization, sockets, ini-file manipulation, streams, list of properties-values, timewatch, extensions to STL. | |
Functions | |
| template<class T , std::size_t N> | |
| bool | mrpt::utils::operator== (const CArray< T, N > &x, const CArray< T, N > &y) |
| template<class T , std::size_t N> | |
| bool | mrpt::utils::operator< (const CArray< T, N > &x, const CArray< T, N > &y) |
| template<class T , std::size_t N> | |
| bool | mrpt::utils::operator!= (const CArray< T, N > &x, const CArray< T, N > &y) |
| template<class T , std::size_t N> | |
| bool | mrpt::utils::operator> (const CArray< T, N > &x, const CArray< T, N > &y) |
| template<class T , std::size_t N> | |
| bool | mrpt::utils::operator<= (const CArray< T, N > &x, const CArray< T, N > &y) |
| template<class T , std::size_t N> | |
| bool | mrpt::utils::operator>= (const CArray< T, N > &x, const CArray< T, N > &y) |