Example: graphs_dijkstra_example
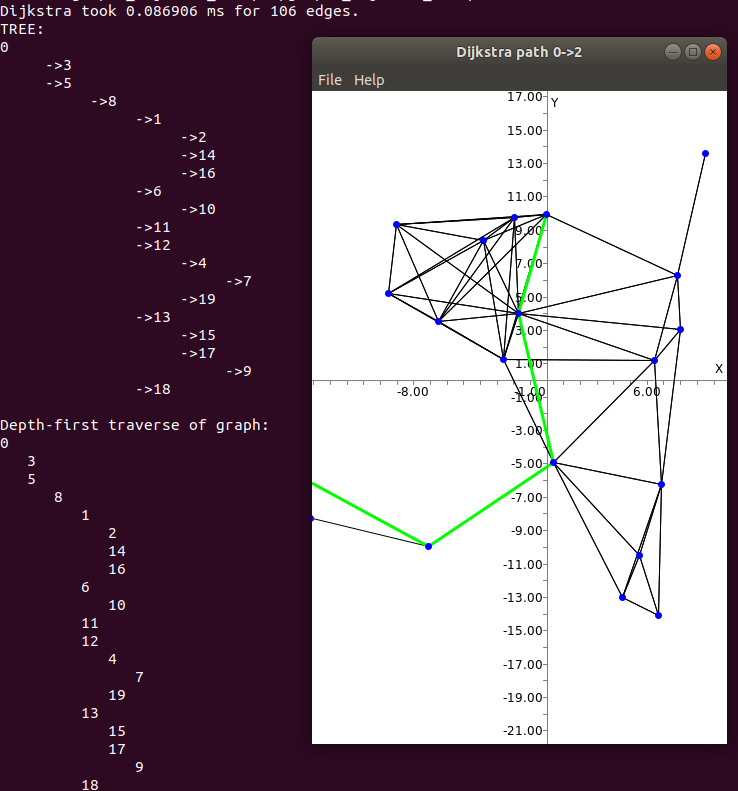
This example demonstrates how to use MRPT C++ implementation of the Dijkstra algorithm for searching optimal paths in a directed, weighted graph. See also the docs for the class mrpt::graphs::CDijkstra
C++ example source code:
/* +------------------------------------------------------------------------+ | Mobile Robot Programming Toolkit (MRPT) | | https://www.mrpt.org/ | | | | Copyright (c) 2005-2024, Individual contributors, see AUTHORS file | | See: https://www.mrpt.org/Authors - All rights reserved. | | Released under BSD License. See: https://www.mrpt.org/License | +------------------------------------------------------------------------+ */ #include <mrpt/graphs/CNetworkOfPoses.h> #include <mrpt/graphs/dijkstra.h> #include <mrpt/gui/CDisplayWindowPlots.h> #include <mrpt/random.h> #include <mrpt/system/CTicTac.h> #include <iostream> #include <map> using namespace mrpt; using namespace mrpt::graphs; using namespace mrpt::poses; using namespace mrpt::math; using namespace mrpt::gui; using namespace mrpt::random; using namespace mrpt::system; using namespace std; // The type of my Dijkstra problem: // (See other options in mrpt::poses::CNetworkOfPoses<>) using CMyDijkstra = mrpt::graphs::CDijkstra<CNetworkOfPoses2D>; // adds a new edge to the graph. The edge is annotated with the relative // position of the two nodes static void addEdge( TNodeID from, TNodeID to, const std::map<TNodeID, CPose2D>& real_poses, CNetworkOfPoses2D& graph_links) { CPose2D p = real_poses.find(to)->second - real_poses.find(from)->second; graph_links.insertEdge(from, to, p); } // weight is the distance between two nodes. double myDijkstraWeight( const CMyDijkstra::graph_t& g, const TNodeID from, const TNodeID to, const CMyDijkstra::edge_t& edge) { // return 1; // Topological distance return edge.norm(); // Metric distance } // ------------------------------------------------------ // TestDijkstra // ------------------------------------------------------ void TestDijkstra() { CTicTac tictac; CNetworkOfPoses2D graph_links; CNetworkOfPoses2D::global_poses_t optimal_poses, optimal_poses_dijkstra; std::map<TNodeID, CPose2D> real_poses; getRandomGenerator().randomize(10); // ---------------------------- // Create a random graph: // ---------------------------- const size_t N_VERTEX = 20; const double DIST_THRES = 10; const double NODES_XY_MAX = 15; vector<double> xs, ys; for (size_t j = 0; j < N_VERTEX; j++) { CPose2D p( getRandomGenerator().drawUniform(-NODES_XY_MAX, NODES_XY_MAX), getRandomGenerator().drawUniform(-NODES_XY_MAX, NODES_XY_MAX), getRandomGenerator().drawUniform(-M_PI, M_PI)); real_poses[j] = p; // for the figure: xs.push_back(p.x()); ys.push_back(p.y()); } // Add some edges for (size_t i = 0; i < N_VERTEX; i++) { for (size_t j = 0; j < N_VERTEX; j++) { if (i == j) continue; if (real_poses[i].distanceTo(real_poses[j]) < DIST_THRES) addEdge(i, j, real_poses, graph_links); } } // ---------------------------- // Dijkstra // ---------------------------- tictac.Tic(); const size_t SOURCE_NODE = 0; #if 0 const size_t maxTopoDistance = 35; // according to myDijkstraWeight() #else const size_t maxTopoDistance = std::numeric_limits<size_t>::max(); #endif CMyDijkstra myDijkstra(graph_links, SOURCE_NODE, &myDijkstraWeight, {}, maxTopoDistance); cout << "Dijkstra took " << tictac.Tac() * 1e3 << " ms for " << graph_links.edges.size() << " edges." << endl; // Demo of getting the tree representation of // the graph & visit its nodes: // --------------------------------------------------------- const CMyDijkstra::tree_graph_t graphAsTree = myDijkstra.getTreeGraph(); // Text representation of the tree: cout << "TREE:\n" << graphAsTree.getAsTextDescription() << endl; auto lmb = [&]([[maybe_unused]] const TNodeID parent, const CMyDijkstra::tree_graph_t::TEdgeInfo& edge_to_child, const size_t depth_level) { cout << string(depth_level * 3, ' '); cout << edge_to_child.id << endl; }; cout << "Depth-first traverse of graph:\n"; cout << SOURCE_NODE << endl; graphAsTree.visitDepthFirst(SOURCE_NODE, lmb); cout << endl << "Breadth-first traverse of graph:\n"; cout << SOURCE_NODE << endl; graphAsTree.visitBreadthFirst(SOURCE_NODE, lmb); // ---------------------------- // Display results graphically: // ---------------------------- CDisplayWindowPlots win("Dijkstra example"); win.hold_on(); win.axis_equal(); for (TNodeID i = 0; i < N_VERTEX && win.isOpen(); i++) { if (i == SOURCE_NODE) continue; const auto dist = myDijkstra.getNodeDistanceToRoot(i); if (!dist.has_value()) { cout << "to " << i << "-> no path found.\n"; continue; } const CMyDijkstra::edge_list_t path = myDijkstra.getShortestPathTo(i); cout << "to " << i << " -> #steps= " << path.size() << " distance=" << dist.value() << endl; win.setWindowTitle(format( "Dijkstra path %u->%u", static_cast<unsigned int>(SOURCE_NODE), static_cast<unsigned int>(i))); win.clf(); // plot all edges: for (CNetworkOfPoses2D::iterator e = graph_links.begin(); e != graph_links.end(); ++e) { const CPose2D& p1 = real_poses[e->first.first]; const CPose2D& p2 = real_poses[e->first.second]; vector<double> X(2); vector<double> Y(2); X[0] = p1.x(); Y[0] = p1.y(); X[1] = p2.x(); Y[1] = p2.y(); win.plot(X, Y, "k1"); } // Draw the shortest path: for (CMyDijkstra::edge_list_t::const_iterator a = path.begin(); a != path.end(); ++a) { const CPose2D& p1 = real_poses[a->first]; const CPose2D& p2 = real_poses[a->second]; vector<double> X(2); vector<double> Y(2); X[0] = p1.x(); Y[0] = p1.y(); X[1] = p2.x(); Y[1] = p2.y(); win.plot(X, Y, "g3"); } // Draw All nodes: win.plot(xs, ys, ".b7"); win.axis_fit(true); cout << "Press any key to show next shortest path, close window to " "end...\n"; win.waitForKey(); } win.clear(); } int main() { try { TestDijkstra(); return 0; } catch (exception& e) { cout << "MRPT exception caught: " << e.what() << endl; return -1; } catch (...) { printf("Another exception!!"); return -1; } }