CPointCloudFilterByDistance.h File Reference
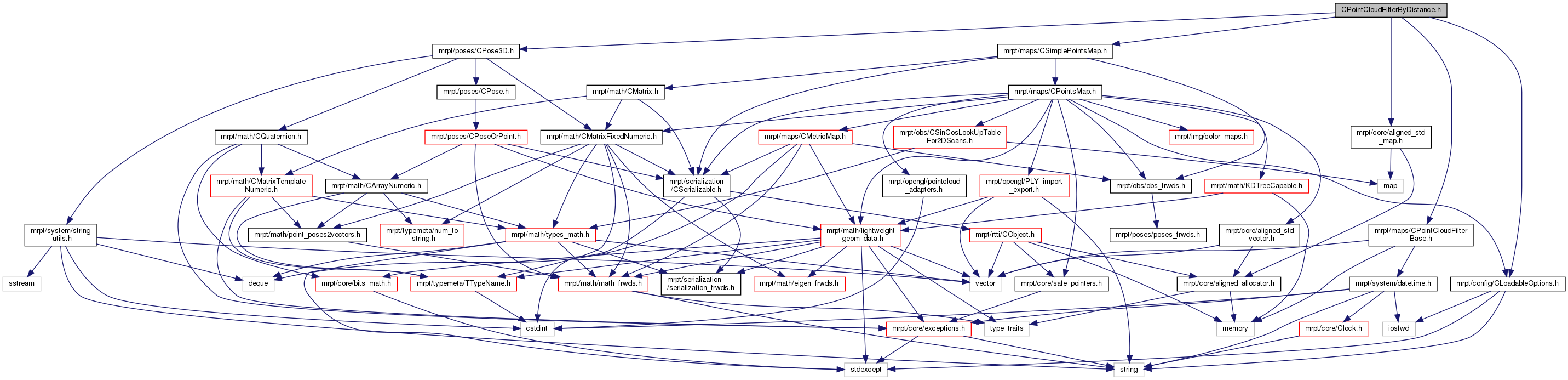
#include <mrpt/maps/CPointCloudFilterBase.h>#include <mrpt/poses/CPose3D.h>#include <mrpt/core/aligned_std_map.h>#include <mrpt/maps/CSimplePointsMap.h>#include <mrpt/config/CLoadableOptions.h>
Include dependency graph for CPointCloudFilterByDistance.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | mrpt::maps::CPointCloudFilterByDistance |
| Implementation of pointcloud filtering based on requisities for minimum neigbouring points in both, the current timestamp and a previous one. More... | |
| struct | mrpt::maps::CPointCloudFilterByDistance::TOptions |
| struct | mrpt::maps::CPointCloudFilterByDistance::FrameInfo |
Namespaces | |
| mrpt::maps | |