graphslam/include/mrpt/graphslam/types.h File Reference
#include <mrpt/graphs/CNetworkOfPoses.h>#include <mrpt/poses/SE_traits.h>#include <mrpt/core/aligned_std_map.h>#include <functional>
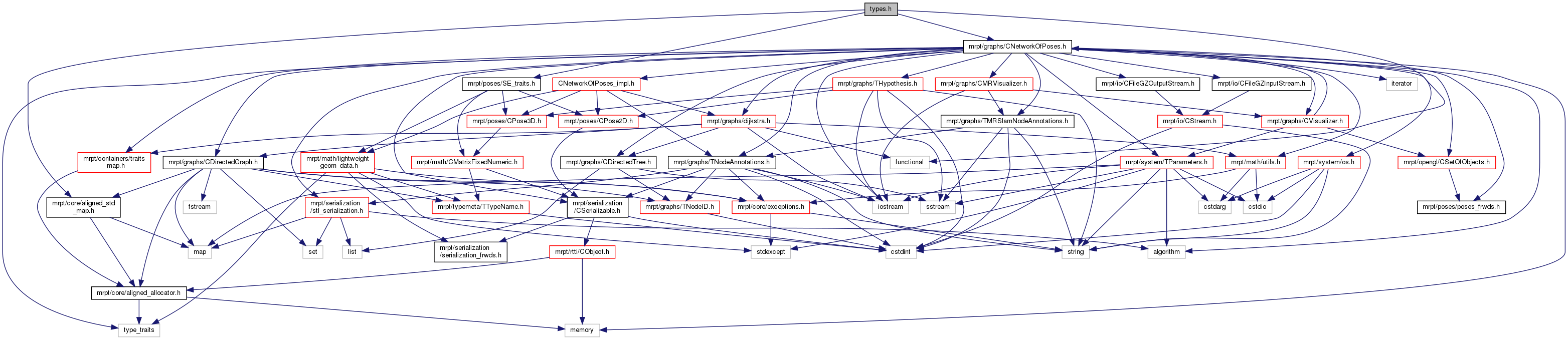
Include dependency graph for graphslam/include/mrpt/graphslam/types.h:
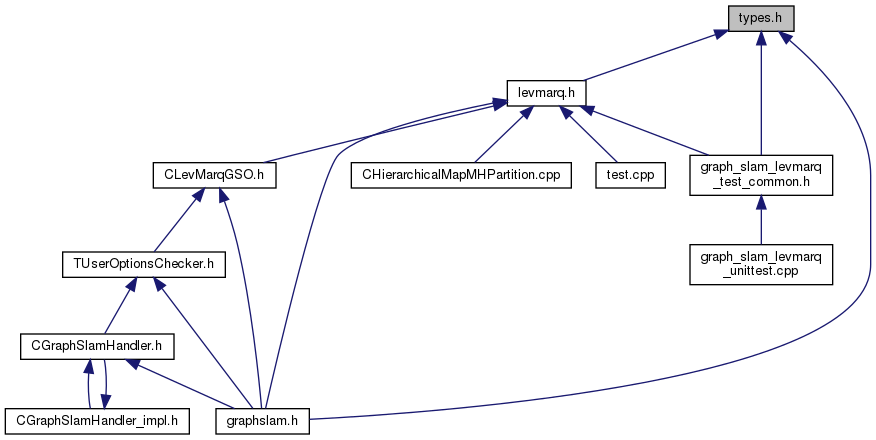
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | mrpt::graphslam::graphslam_traits< GRAPH_T > |
| Auxiliary traits template for use among graph-slam problems to make life easier with these complicated, long data type names. More... | |
| struct | mrpt::graphslam::graphslam_traits< GRAPH_T >::observation_info_t |
| Auxiliary struct used in graph-slam implementation: It holds the relevant information for each of the constraints being taking into account. More... | |
| struct | mrpt::graphslam::TResultInfoSpaLevMarq |
| Output information for mrpt::graphslam::optimize_graph_spa_levmarq() More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::graphslam | |
| SLAM methods related to graphs of pose constraints. | |