Detailed Description
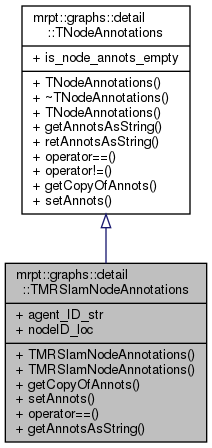
Struct to be used as the NODE_ANNOTATIONS template argument in CNetworkOfPoses class instances for use in multiple-robot SLAM applications.
Definition at line 24 of file TMRSlamNodeAnnotations.h.
#include <mrpt/graphs/TMRSlamNodeAnnotations.h>
Public Types | |
| using | parent_t = TNodeAnnotations |
| using | self_t = TMRSlamNodeAnnotations |
Public Member Functions | |
| TMRSlamNodeAnnotations () | |
| TMRSlamNodeAnnotations (const TMRSlamNodeAnnotations &other) | |
| TNodeAnnotations * | getCopyOfAnnots () const |
| bool | setAnnots (const parent_t &other) |
| bool | operator== (const TNodeAnnotations &other) const |
| void | getAnnotsAsString (std::string *s) const |
| std::string | retAnnotsAsString () const |
| virtual bool | operator!= (const TNodeAnnotations &other) const |
Public Attributes | |
| std::string | agent_ID_str |
| string identifier of the SLAM Agent that initially registered this node. More... | |
| mrpt::graphs::TNodeID | nodeID_loc |
| ID of node in the graph of the SLAM Agent that initially registered this node. More... | |
| bool | is_node_annots_empty |
| Indicates if this is a dummy TNodeAnnotations struct or if it does contain meaningful data. More... | |
Member Typedef Documentation
◆ parent_t
Definition at line 28 of file TMRSlamNodeAnnotations.h.
◆ self_t
Definition at line 29 of file TMRSlamNodeAnnotations.h.
Constructor & Destructor Documentation
◆ TMRSlamNodeAnnotations() [1/2]
|
inline |
Definition at line 31 of file TMRSlamNodeAnnotations.h.
◆ TMRSlamNodeAnnotations() [2/2]
|
inline |
Definition at line 32 of file TMRSlamNodeAnnotations.h.
References setAnnots().
Member Function Documentation
◆ getAnnotsAsString()
|
inlinevirtual |
Reimplemented from mrpt::graphs::detail::TNodeAnnotations.
Definition at line 79 of file TMRSlamNodeAnnotations.h.
References agent_ID_str, mrpt::graphs::detail::TNodeAnnotations::getAnnotsAsString(), and nodeID_loc.
◆ getCopyOfAnnots()
|
inline |
Definition at line 38 of file TMRSlamNodeAnnotations.h.
◆ operator!=()
|
inlinevirtualinherited |
Definition at line 49 of file TNodeAnnotations.h.
◆ operator==()
|
inlinevirtual |
Reimplemented from mrpt::graphs::detail::TNodeAnnotations.
Definition at line 63 of file TMRSlamNodeAnnotations.h.
References agent_ID_str, and nodeID_loc.
◆ retAnnotsAsString()
|
inlineinherited |
Definition at line 38 of file TNodeAnnotations.h.
References mrpt::graphs::detail::TNodeAnnotations::getAnnotsAsString().
◆ setAnnots()
|
inline |
Definition at line 43 of file TMRSlamNodeAnnotations.h.
References agent_ID_str, nodeID_loc, and mrpt::graphs::detail::TNodeAnnotations::setAnnots().
Referenced by TMRSlamNodeAnnotations().
Member Data Documentation
◆ agent_ID_str
| std::string mrpt::graphs::detail::TMRSlamNodeAnnotations::agent_ID_str |
string identifier of the SLAM Agent that initially registered this node.
Definition at line 93 of file TMRSlamNodeAnnotations.h.
Referenced by getAnnotsAsString(), operator==(), and setAnnots().
◆ is_node_annots_empty
|
inherited |
Indicates if this is a dummy TNodeAnnotations struct or if it does contain meaningful data.
Definition at line 68 of file TNodeAnnotations.h.
Referenced by mrpt::graphs::detail::TNodeAnnotationsEmpty::TNodeAnnotationsEmpty().
◆ nodeID_loc
| mrpt::graphs::TNodeID mrpt::graphs::detail::TMRSlamNodeAnnotations::nodeID_loc |
ID of node in the graph of the SLAM Agent that initially registered this node.
- Note
- Field is handy especially in cases where one SLAM agent communicates its local graph to another agent and we still want to keep track of the node ID in the former's graph.
Definition at line 103 of file TMRSlamNodeAnnotations.h.
Referenced by getAnnotsAsString(), operator==(), and setAnnots().