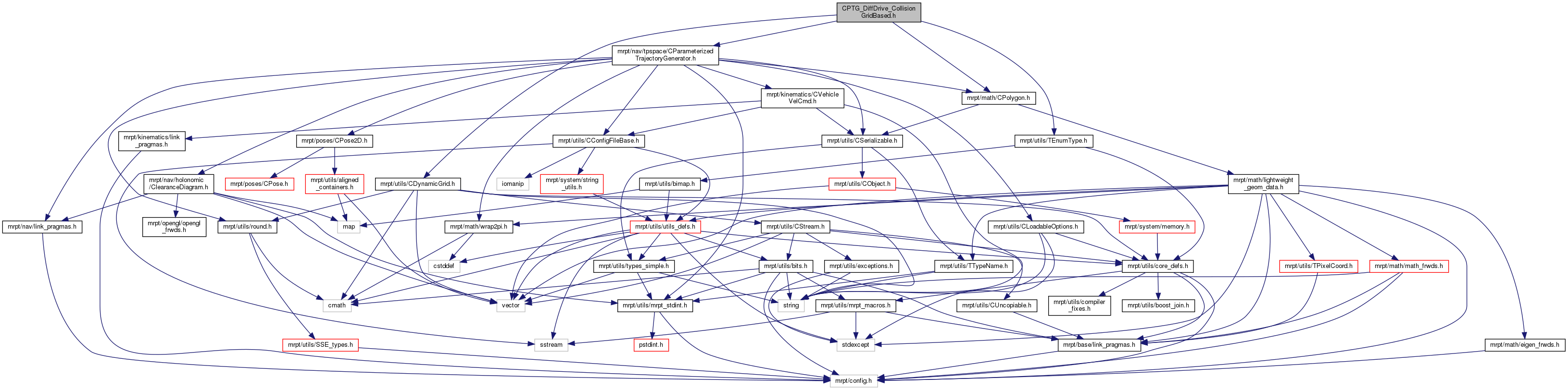
#include <mrpt/nav/tpspace/CParameterizedTrajectoryGenerator.h>#include <mrpt/utils/CDynamicGrid.h>#include <mrpt/math/CPolygon.h>#include <mrpt/utils/TEnumType.h>
Include dependency graph for CPTG_DiffDrive_CollisionGridBased.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | mrpt::nav::TCPoint |
| Trajectory points in C-Space for non-holonomic robots. More... | |
| class | mrpt::nav::CPTG_DiffDrive_CollisionGridBased |
| Base class for all PTGs suitable to non-holonomic, differentially-driven (or Ackermann) vehicles based on numerical integration of the trajectories and collision look-up-table. More... | |
| class | mrpt::nav::CPTG_DiffDrive_CollisionGridBased::CCollisionGrid |
| An internal class for storing the collision grid More... | |
| struct | mrpt::nav::CPTG_DiffDrive_CollisionGridBased::TCellForLambdaFunction |
| Specifies the min/max values for "k" and "n", respectively. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::nav | |
| mrpt::utils | |
| Classes for serialization, sockets, ini-file manipulation, streams, list of properties-values, timewatch, extensions to STL. | |
Typedefs | |
| typedef std::vector< TCPoint > | mrpt::nav::TCPointVector |
Functions | |
| mrpt::utils::CStream NAV_IMPEXP & | mrpt::nav::operator<< (mrpt::utils::CStream &o, const mrpt::nav::TCPoint &p) |
| mrpt::utils::CStream NAV_IMPEXP & | mrpt::nav::operator>> (mrpt::utils::CStream &i, mrpt::nav::TCPoint &p) |