#include <mrpt/utils/core_defs.h>#include <mrpt/utils/COutputLogger.h>#include <mrpt/utils/CLoadableOptions.h>
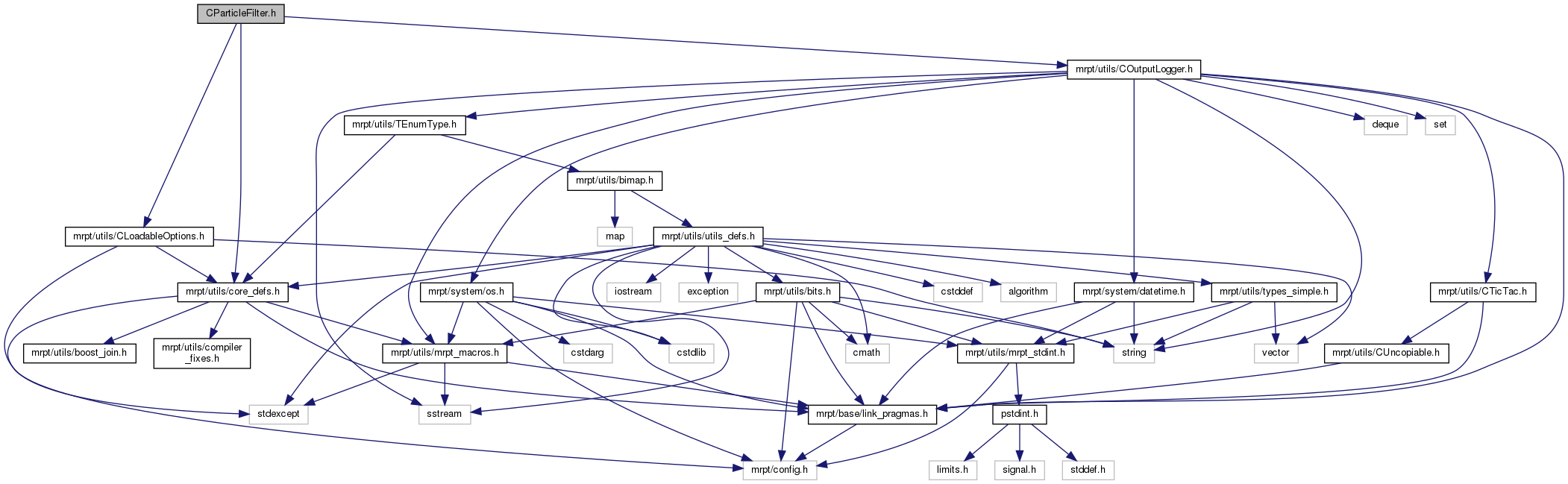
Include dependency graph for CParticleFilter.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| class | mrpt::bayes::CParticleFilter |
| This class acts as a common interface to the different interfaces (see CParticleFilter::TParticleFilterAlgorithm) any bayes::CParticleFilterCapable class can implement: it is the invoker of particle filter algorithms. More... | |
| struct | mrpt::bayes::CParticleFilter::TParticleFilterOptions |
| The configuration of a particle filter. More... | |
| struct | mrpt::bayes::CParticleFilter::TParticleFilterStats |
| Statistics for being returned from the "execute" method. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::obs | |
| This namespace contains representation of robot actions and observations. | |
| mrpt::bayes | |
| The namespace for Bayesian filtering algorithm: different particle filters and Kalman filter algorithms. | |