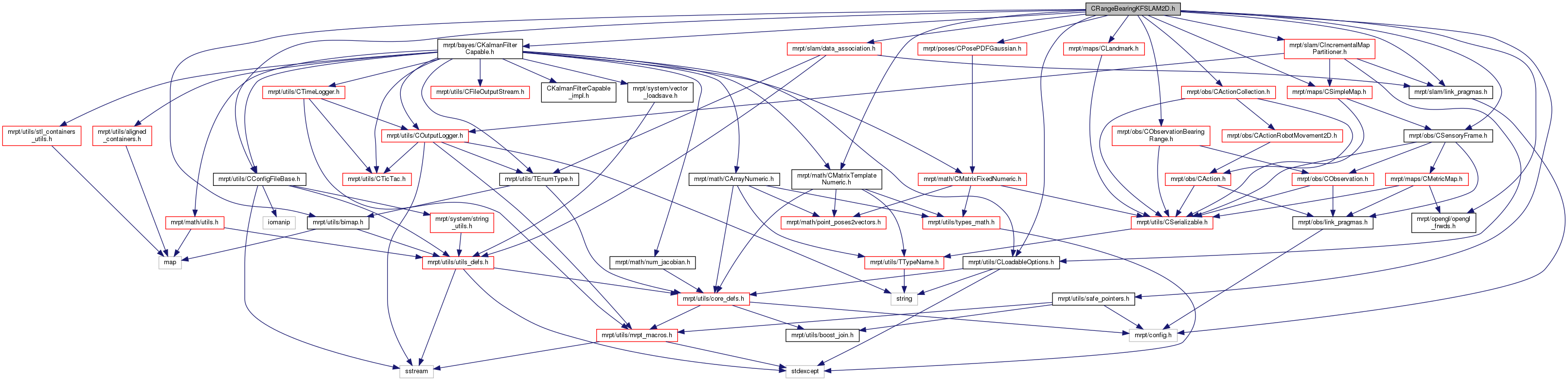
#include <mrpt/math/CMatrixTemplateNumeric.h>#include <mrpt/utils/CConfigFileBase.h>#include <mrpt/utils/CLoadableOptions.h>#include <mrpt/opengl/opengl_frwds.h>#include <mrpt/bayes/CKalmanFilterCapable.h>#include <mrpt/utils/safe_pointers.h>#include <mrpt/utils/bimap.h>#include <mrpt/obs/CSensoryFrame.h>#include <mrpt/obs/CActionCollection.h>#include <mrpt/obs/CObservationBearingRange.h>#include <mrpt/poses/CPosePDFGaussian.h>#include <mrpt/maps/CLandmark.h>#include <mrpt/maps/CSimpleMap.h>#include <mrpt/slam/CIncrementalMapPartitioner.h>#include <mrpt/slam/data_association.h>#include <mrpt/slam/link_pragmas.h>
Include dependency graph for CRangeBearingKFSLAM2D.h:
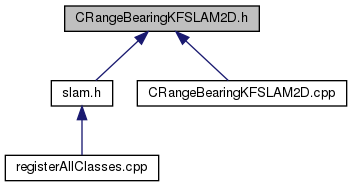
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mrpt::slam::CRangeBearingKFSLAM2D |
| An implementation of EKF-based SLAM with range-bearing sensors, odometry, and a 2D (+heading) robot pose, and 2D landmarks. More... | |
| struct | mrpt::slam::CRangeBearingKFSLAM2D::TOptions |
| The options for the algorithm. More... | |
| struct | mrpt::slam::CRangeBearingKFSLAM2D::TDataAssocInfo |
| Information for data-association: More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::slam | |