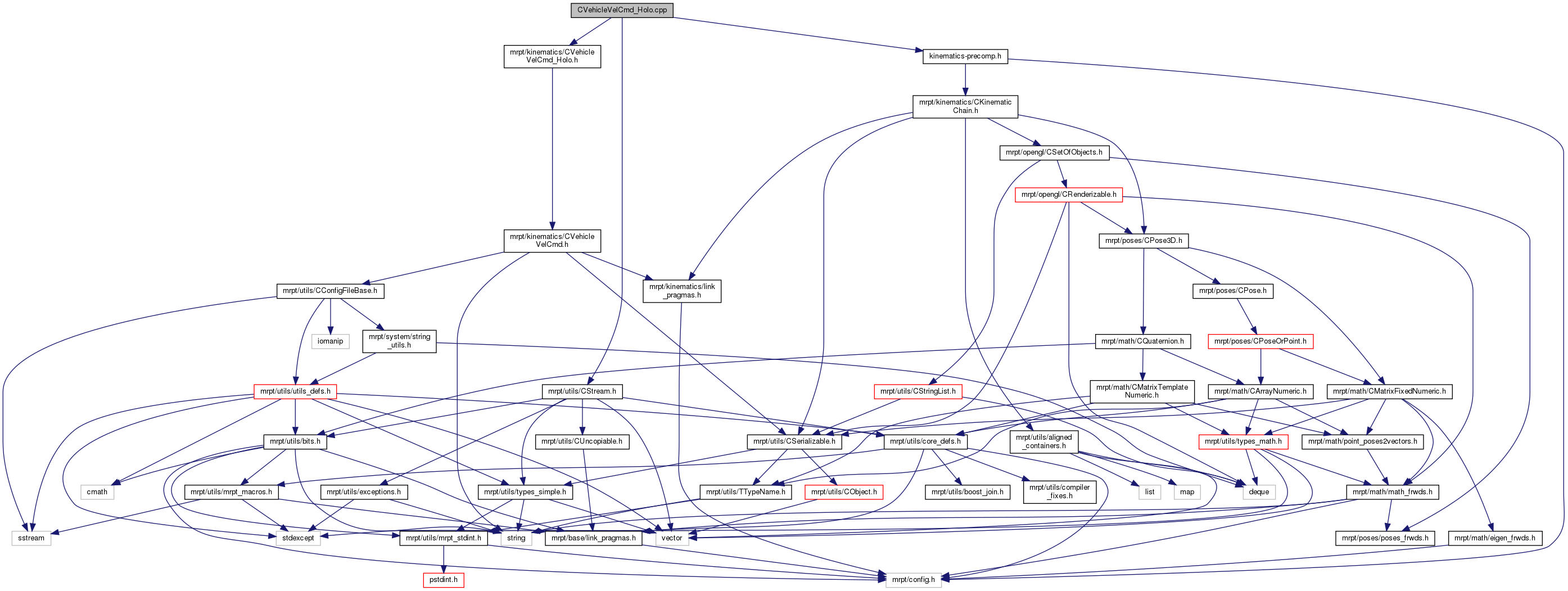
#include "kinematics-precomp.h"#include <mrpt/kinematics/CVehicleVelCmd_Holo.h>#include <mrpt/utils/CStream.h>
Include dependency graph for CVehicleVelCmd_Holo.cpp:
#include "kinematics-precomp.h"#include <mrpt/kinematics/CVehicleVelCmd_Holo.h>#include <mrpt/utils/CStream.h>| Page generated by Doxygen 1.9.1 for MRPT 1.5.9 Git: 3344049dc Wed Apr 15 19:29:53 2020 +0200 at mar 26 may 2026 12:39:22 CEST | |