#include <mrpt/vision/types.h>
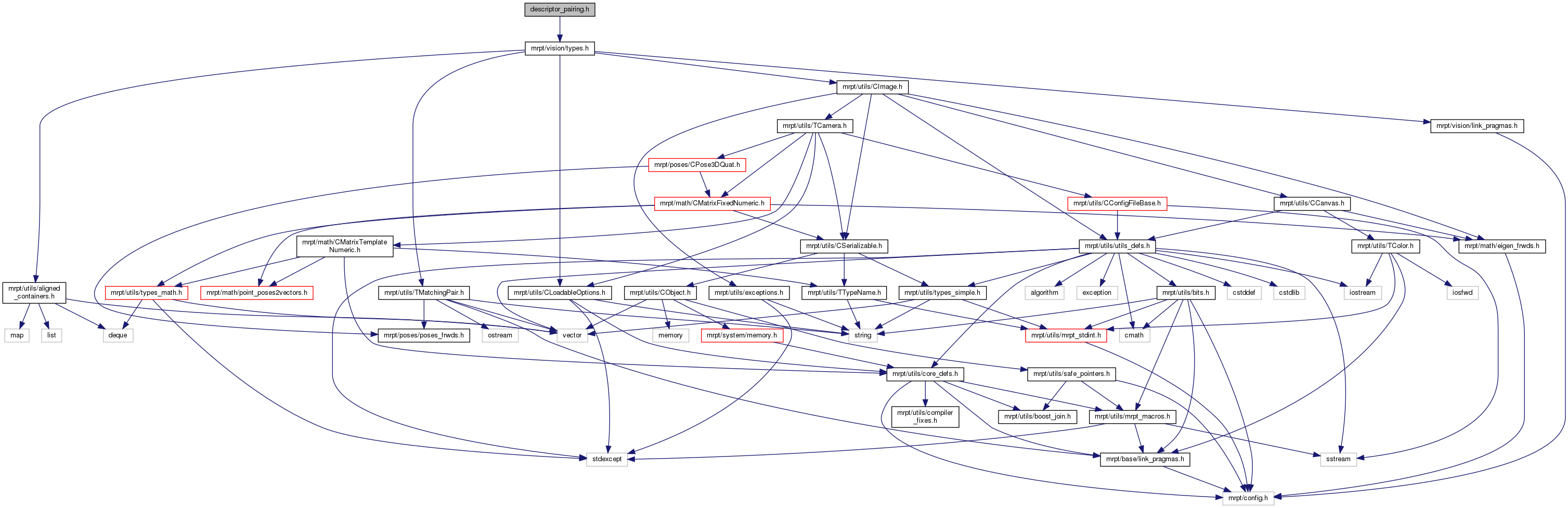
Include dependency graph for descriptor_pairing.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::vision | |
| Classes for computer vision, detectors, features, etc. | |
Functions | |
| template<class DESCRIPTOR_KDTREE > | |
| size_t | mrpt::vision::find_descriptor_pairings (std::vector< vector_size_t > *pairings_1_to_multi_2, std::vector< std::pair< size_t, size_t > > *pairings_1_to_2, const CFeatureList &feats_img1, const DESCRIPTOR_KDTREE &feats_img2_kdtree, const mrpt::vision::TDescriptorType descriptor=descSIFT, const size_t max_neighbors=4, const double max_relative_distance=1.2, const typename DESCRIPTOR_KDTREE::kdtree_t::DistanceType max_distance=std::numeric_limits< typename DESCRIPTOR_KDTREE::kdtree_t::DistanceType >::max()) |
| Search for pairings between two sets of visual descriptors (for now, only SURF and SIFT features are considered). More... | |