#include <mrpt/math/interp_fit.h>
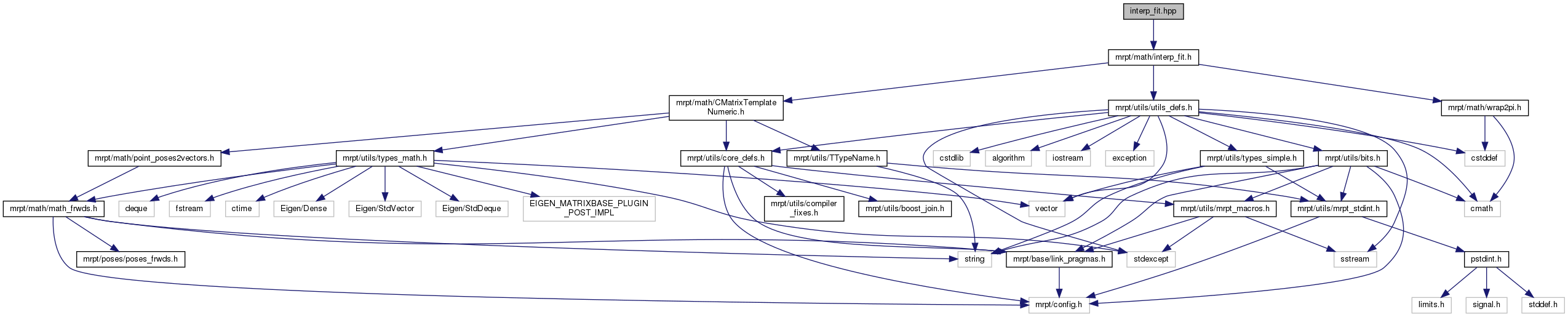
Include dependency graph for interp_fit.hpp:
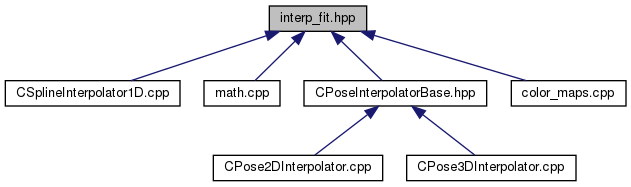
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::math | |
| This base provides a set of functions for maths stuff. | |
Functions | |
| template<class T , class VECTOR > | |
| T | mrpt::math::interpolate (const T &x, const VECTOR &ys, const T &x0, const T &x1) |
| Interpolate a data sequence "ys" ranging from "x0" to "x1" (equally spaced), to obtain the approximation of the sequence at the point "x". More... | |
| template<typename NUMTYPE , class VECTORLIKE > | |
| NUMTYPE | mrpt::math::spline (const NUMTYPE t, const VECTORLIKE &x, const VECTORLIKE &y, bool wrap2pi=false) |
| Interpolates the value of a function in a point "t" given 4 SORTED points where "t" is between the two middle points If wrap2pi is true, output "y" values are wrapped to ]-pi,pi] (It is assumed that input "y" values already are in the correct range). More... | |
| template<typename NUMTYPE , class VECTORLIKE , int NUM_POINTS = Eigen::Dynamic> | |
| NUMTYPE | mrpt::math::leastSquareLinearFit (const NUMTYPE t, const VECTORLIKE &x, const VECTORLIKE &y, bool wrap2pi=false) |
| Interpolates or extrapolates using a least-square linear fit of the set of values "x" and "y", evaluated at a single point "t". More... | |
| template<class VECTORLIKE1 , class VECTORLIKE2 , class VECTORLIKE3 , int NUM_POINTS = Eigen::Dynamic> | |
| void | mrpt::math::leastSquareLinearFit (const VECTORLIKE1 &ts, VECTORLIKE2 &outs, const VECTORLIKE3 &x, const VECTORLIKE3 &y, bool wrap2pi=false) |
| Interpolates or extrapolates using a least-square linear fit of the set of values "x" and "y", evaluated at a sequence of points "ts" and returned at "outs". More... | |