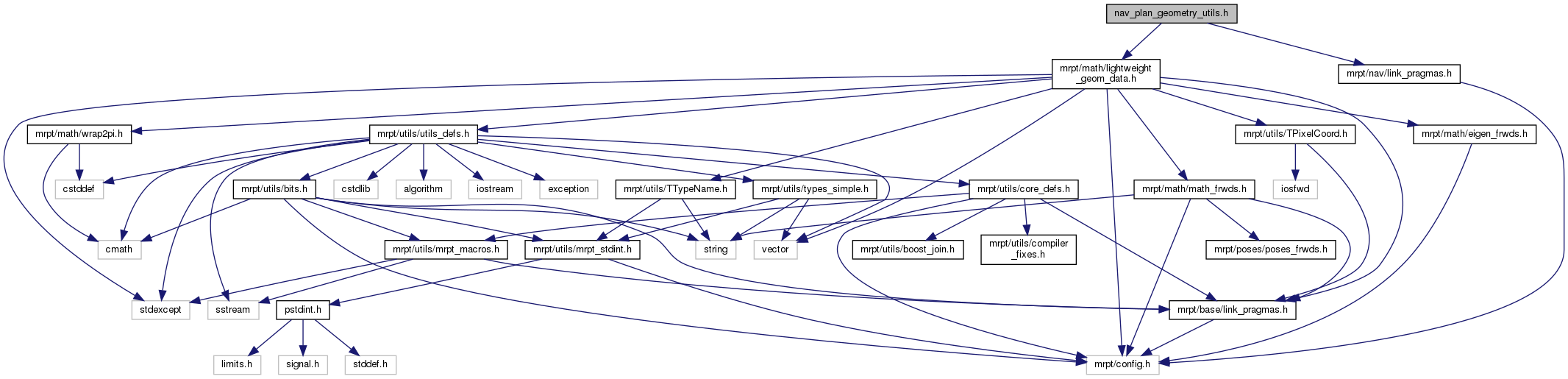
Include dependency graph for nav_plan_geometry_utils.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::nav | |
Functions | |
| bool NAV_IMPEXP | mrpt::nav::collision_free_dist_segment_circ_robot (const mrpt::math::TPoint2D &p_start, const mrpt::math::TPoint2D &p_end, const double robot_radius, const mrpt::math::TPoint2D &obstacle, double &out_col_dist) |
| Computes the collision-free distance for a linear segment path between two points, for a circular robot, and a point obstacle (ox,oy). More... | |
| bool NAV_IMPEXP | mrpt::nav::collision_free_dist_arc_circ_robot (const double arc_radius, const double robot_radius, const mrpt::math::TPoint2D &obstacle, double &out_col_dist) |
| Computes the collision-free distance for a forward path (+X) circular arc path segment from pose (0,0,0) and radius of curvature R (>0 -> +Y, <0 -> -Y), a circular robot and a point obstacle (ox,oy). More... | |