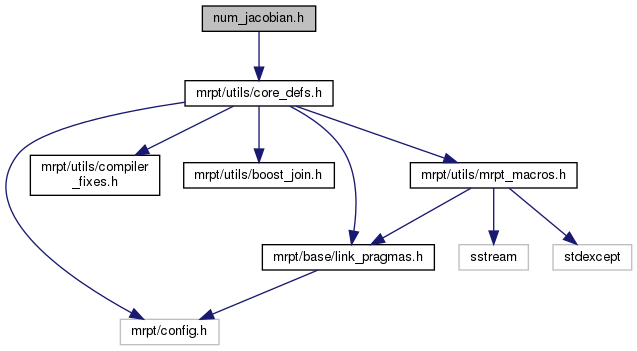
#include <mrpt/utils/core_defs.h>
Include dependency graph for num_jacobian.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::math | |
| This base provides a set of functions for maths stuff. | |
Functions | |
| template<class VECTORLIKE , class VECTORLIKE2 , class VECTORLIKE3 , class MATRIXLIKE , class USERPARAM > | |
| void | mrpt::math::estimateJacobian (const VECTORLIKE &x, void(*functor)(const VECTORLIKE &x, const USERPARAM &y, VECTORLIKE3 &out), const VECTORLIKE2 &increments, const USERPARAM &userParam, MATRIXLIKE &out_Jacobian) |
| Estimate the Jacobian of a multi-dimensional function around a point "x", using finite differences of a given size in each input dimension. More... | |