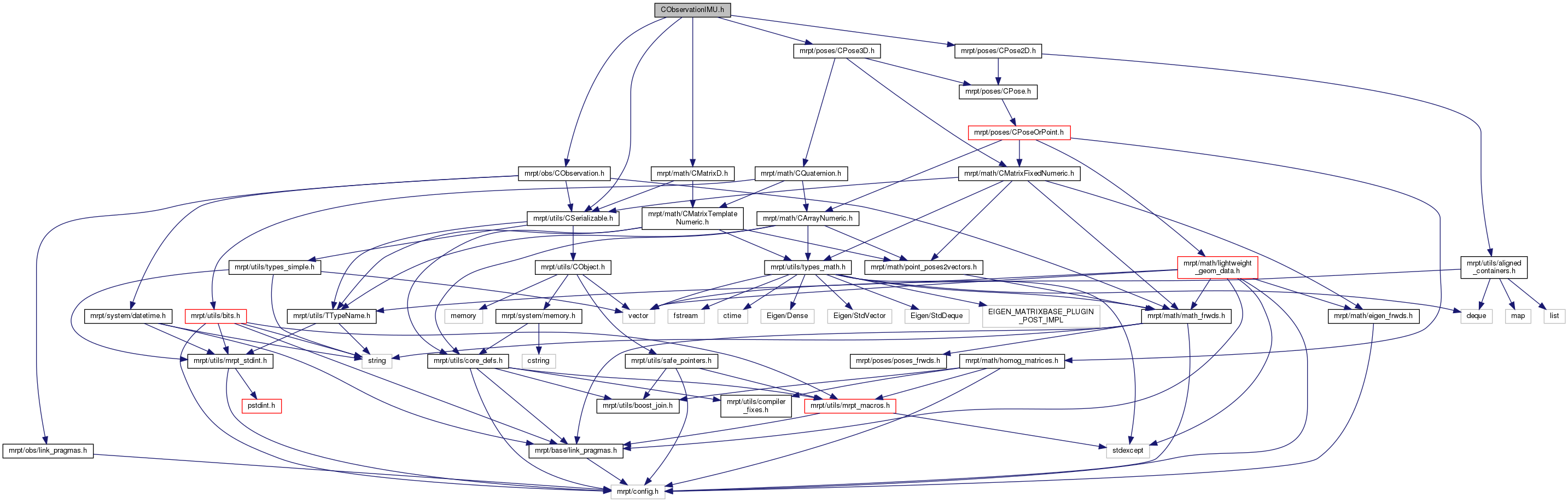
#include <mrpt/utils/CSerializable.h>#include <mrpt/math/CMatrixD.h>#include <mrpt/obs/CObservation.h>#include <mrpt/poses/CPose3D.h>#include <mrpt/poses/CPose2D.h>
Include dependency graph for obs/CObservationIMU.h:
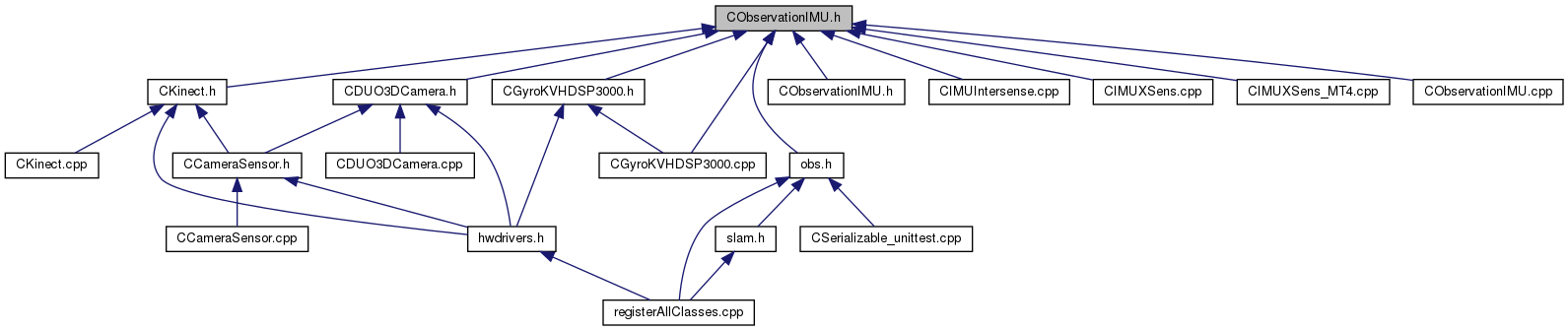
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mrpt::obs::CObservationIMU |
| This class stores measurements from an Inertial Measurement Unit (IMU) (attitude estimation, raw gyroscope and accelerometer values), altimeters or magnetometers. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::obs | |
| This namespace contains representation of robot actions and observations. | |
Functions | |
| ::mrpt::utils::CStream & | mrpt::obs::operator>> (mrpt::utils::CStream &in, CObservationIMUPtr &pObj) |