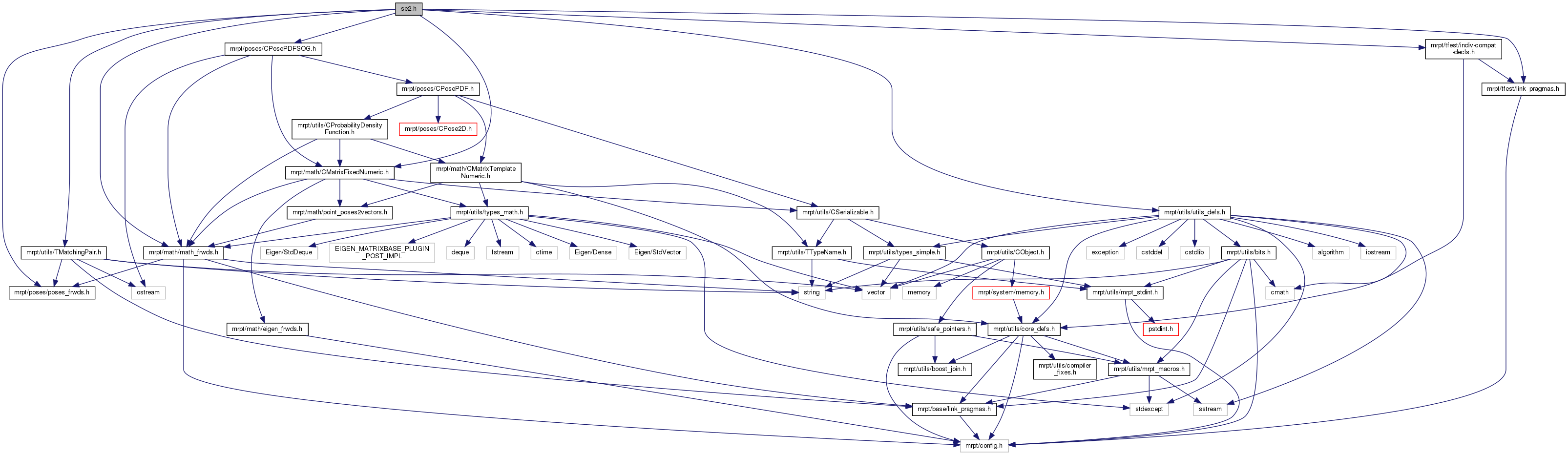
#include <mrpt/utils/utils_defs.h>#include <mrpt/math/math_frwds.h>#include <mrpt/math/CMatrixFixedNumeric.h>#include <mrpt/poses/CPosePDFSOG.h>#include <mrpt/utils/TMatchingPair.h>#include <mrpt/tfest/link_pragmas.h>#include <mrpt/poses/poses_frwds.h>#include <mrpt/tfest/indiv-compat-decls.h>
Include dependency graph for se2.h:
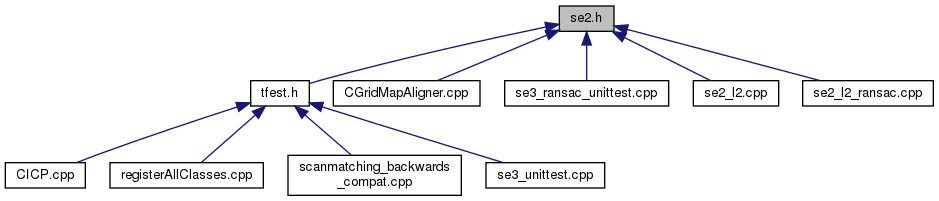
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | mrpt::tfest::TSE2RobustParams |
| Parameters for se2_l2_robust(). More... | |
| struct | mrpt::tfest::TSE2RobustResult |
| Output placeholder for se2_l2_robust() More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::tfest | |
| Functions for estimating the optimal transformation between two frames of references given measurements of corresponding points. | |
Functions | |
| bool TFEST_IMPEXP | mrpt::tfest::se2_l2 (const mrpt::utils::TMatchingPairList &in_correspondences, mrpt::math::TPose2D &out_transformation, mrpt::math::CMatrixDouble33 *out_estimateCovariance=NULL) |
| Least-squares (L2 norm) solution to finding the optimal SE(2) (x,y,yaw) between two reference frames. More... | |
| bool TFEST_IMPEXP | mrpt::tfest::se2_l2 (const mrpt::utils::TMatchingPairList &in_correspondences, mrpt::poses::CPosePDFGaussian &out_transformation) |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| bool TFEST_IMPEXP | mrpt::tfest::se2_l2_robust (const mrpt::utils::TMatchingPairList &in_correspondences, const double in_normalizationStd, const TSE2RobustParams &in_ransac_params, TSE2RobustResult &out_results) |
| Robust least-squares (L2 norm) solution to finding the optimal SE(2) (x,y,yaw) between two reference frames. More... | |