#include <mrpt/config/CLoadableOptions.h>#include <mrpt/rtti/CObject.h>#include <mrpt/maps/TMetricMapTypesRegistry.h>#include <mrpt/maps/metric_map_types.h>#include <deque>
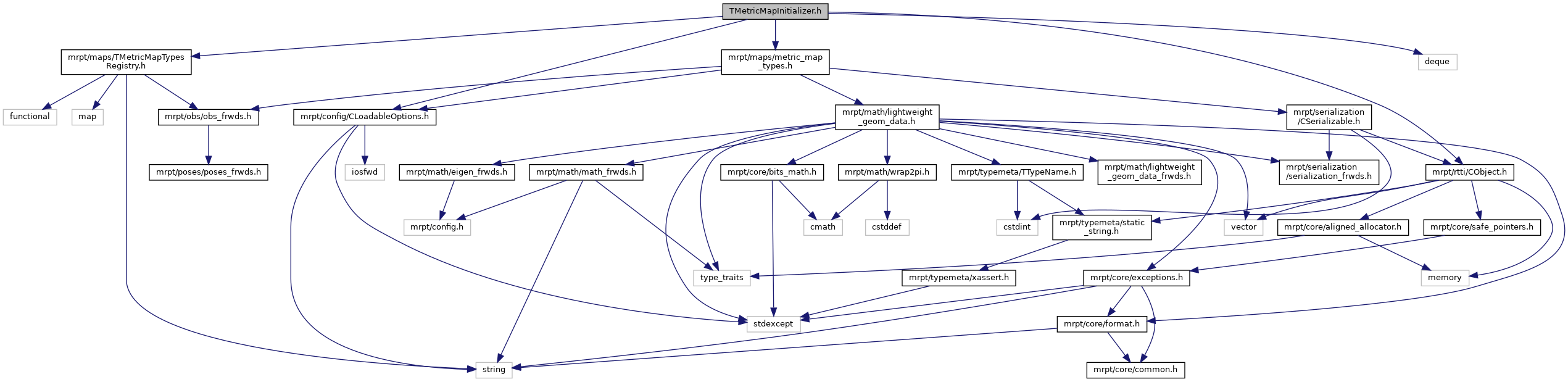
Include dependency graph for TMetricMapInitializer.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | mrpt::maps::TMetricMapInitializer |
Virtual base for specifying the kind and parameters of one map (normally, to be inserted into mrpt::maps::CMultiMetricMap) See mrpt::maps::TSetOfMetricMapInitializers::loadFromConfigFile() as an easy way of initialize this object, or construct with the factory methods <metric_map_class>::MapDefinition() and TMetricMapInitializer::factory() More... | |
| class | mrpt::maps::TSetOfMetricMapInitializers |
| A set of TMetricMapInitializer structures, passed to the constructor CMultiMetricMap::CMultiMetricMap See the comments for TSetOfMetricMapInitializers::loadFromConfigFile, and "CMultiMetricMap::setListOfMaps" for effectively creating the list of desired maps. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::maps | |