#include <mrpt/graphslam/types.h>#include <mrpt/system/TParameters.h>#include <mrpt/containers/stl_containers_utils.h>#include <mrpt/core/aligned_std_map.h>#include <mrpt/graphslam/levmarq_impl.h>#include <mrpt/system/CTimeLogger.h>#include <mrpt/math/CSparseMatrix.h>
Include dependency graph for levmarq.h:

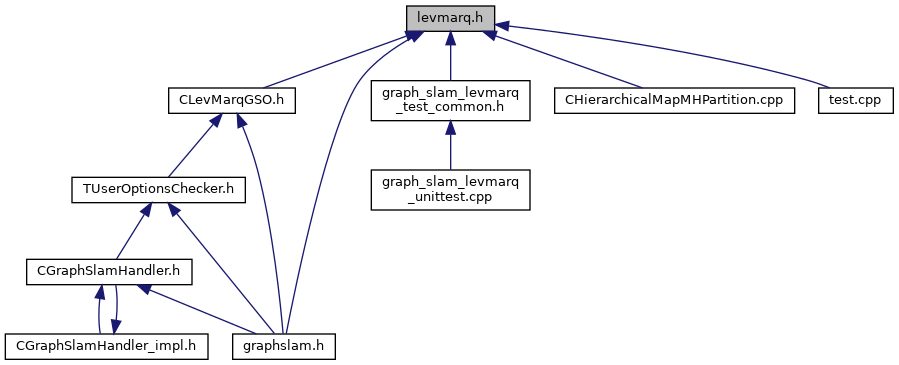
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::graphslam | |
| SLAM methods related to graphs of pose constraints. | |
Functions | |
| template<class GRAPH_T > | |
| void | mrpt::graphslam::optimize_graph_spa_levmarq (GRAPH_T &graph, TResultInfoSpaLevMarq &out_info, const std::set< mrpt::graphs::TNodeID > *in_nodes_to_optimize=nullptr, const mrpt::system::TParametersDouble &extra_params=mrpt::system::TParametersDouble(), typename graphslam_traits< GRAPH_T >::TFunctorFeedback functor_feedback=typename graphslam_traits< GRAPH_T >::TFunctorFeedback()) |
| Optimize a graph of pose constraints using the Sparse Pose Adjustment (SPA) sparse representation and a Levenberg-Marquardt optimizer. More... | |