Detailed Description
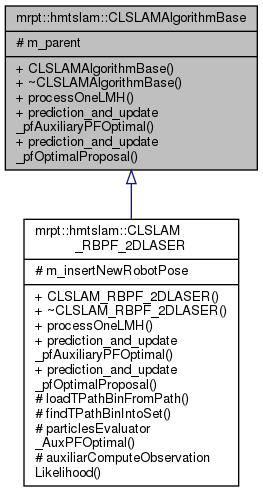
Virtual base for local SLAM methods, used in mrpt::slam::CHMTSLAM.
Definition at line 461 of file CHMTSLAM.h.
#include <mrpt/hmtslam/CHMTSLAM.h>
Public Member Functions | |
| CLSLAMAlgorithmBase (CHMTSLAM *parent) | |
| Constructor. More... | |
| virtual | ~CLSLAMAlgorithmBase () |
| Destructor. More... | |
| virtual void | processOneLMH (CLocalMetricHypothesis *LMH, const mrpt::obs::CActionCollectionPtr &act, const mrpt::obs::CSensoryFramePtr &sf)=0 |
| Main entry point from HMT-SLAM: process some actions & observations. More... | |
| virtual void | prediction_and_update_pfAuxiliaryPFOptimal (CLocalMetricHypothesis *LMH, const mrpt::obs::CActionCollection *action, const mrpt::obs::CSensoryFrame *observation, const bayes::CParticleFilter::TParticleFilterOptions &PF_options)=0 |
| The PF algorithm implementation. More... | |
| virtual void | prediction_and_update_pfOptimalProposal (CLocalMetricHypothesis *LMH, const mrpt::obs::CActionCollection *action, const mrpt::obs::CSensoryFrame *observation, const bayes::CParticleFilter::TParticleFilterOptions &PF_options)=0 |
| The PF algorithm implementation. More... | |
Protected Attributes | |
| mrpt::utils::safe_ptr< CHMTSLAM > | m_parent |
Friends | |
| class | CLocalMetricHypothesis |
Constructor & Destructor Documentation
◆ CLSLAMAlgorithmBase()
|
inline |
Constructor.
Definition at line 470 of file CHMTSLAM.h.
◆ ~CLSLAMAlgorithmBase()
|
inlinevirtual |
Destructor.
Definition at line 474 of file CHMTSLAM.h.
Member Function Documentation
◆ prediction_and_update_pfAuxiliaryPFOptimal()
|
pure virtual |
The PF algorithm implementation.
Implemented in mrpt::hmtslam::CLSLAM_RBPF_2DLASER.
◆ prediction_and_update_pfOptimalProposal()
|
pure virtual |
The PF algorithm implementation.
Implemented in mrpt::hmtslam::CLSLAM_RBPF_2DLASER.
◆ processOneLMH()
|
pure virtual |
Main entry point from HMT-SLAM: process some actions & observations.
The passed action/observation will be deleted, so a copy must be made if necessary. This method must be in charge of updating the robot pose estimates and also to update the map when required.
- Parameters
-
LMH The local metric hypothesis which must be updated by this SLAM algorithm. act The action to process (or NULL). sf The observations to process (or NULL).
Implemented in mrpt::hmtslam::CLSLAM_RBPF_2DLASER.
Friends And Related Function Documentation
◆ CLocalMetricHypothesis
|
friend |
Definition at line 463 of file CHMTSLAM.h.
Member Data Documentation
◆ m_parent
|
protected |
Definition at line 465 of file CHMTSLAM.h.
Referenced by mrpt::hmtslam::CLSLAM_RBPF_2DLASER::loadTPathBinFromPath(), and mrpt::hmtslam::CLSLAM_RBPF_2DLASER::processOneLMH().