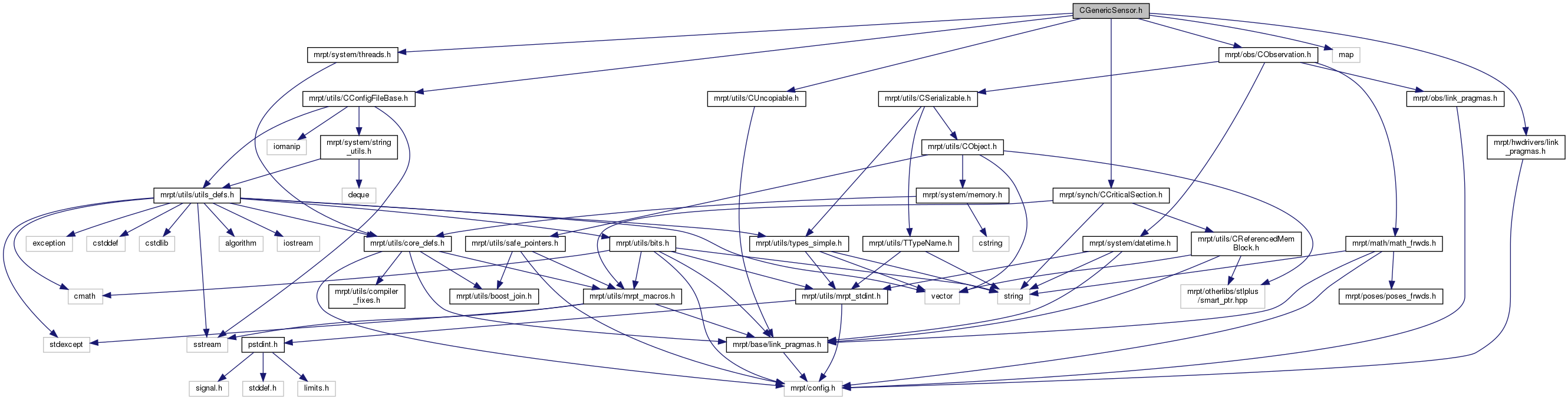
#include <mrpt/utils/CConfigFileBase.h>#include <mrpt/utils/CUncopiable.h>#include <mrpt/obs/CObservation.h>#include <mrpt/synch/CCriticalSection.h>#include <mrpt/system/threads.h>#include <map>#include <mrpt/hwdrivers/link_pragmas.h>
Include dependency graph for CGenericSensor.h:
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | mrpt::hwdrivers::TSensorClassId |
| A structure for runtime ID class type information in the context of hwdrivers::CGenericSensor. More... | |
| class | mrpt::hwdrivers::CGenericSensor |
| A generic interface for a wide-variety of sensors designed to be used in the application RawLogGrabber. More... | |
| struct | mrpt::hwdrivers::CGenericSensor::CLASSINIT_GENERIC_SENSOR |
| Auxiliary structure used for CSerializable runtime class ID support. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::hwdrivers | |
| Contains classes for various device interfaces. | |
Macros | |
| #define | SENSOR_CLASS_ID(class_name) static_cast<const mrpt::hwdrivers::TSensorClassId*>(& mrpt::hwdrivers::class_name::class##class_name) |
| #define | SENSOR_IS_CLASS(ptrObj, class_name) (ptrObj->GetRuntimeClass()==SENSOR_CLASS_ID(class_name)) |
| #define | DEFINE_GENERIC_SENSOR(class_name) |
| This declaration must be inserted in all CGenericSensor classes definition, within the class declaration. More... | |
| #define | IMPLEMENTS_GENERIC_SENSOR(class_name, NameSpace) |
| This must be inserted in all CGenericSensor classes implementation files: More... | |
Typedefs | |
| typedef stlplus::smart_ptr< CGenericSensor > | mrpt::hwdrivers::CGenericSensorPtr |
Variables | |
| class HWDRIVERS_IMPEXP | mrpt::hwdrivers::CGenericSensor |
Macro Definition Documentation
◆ DEFINE_GENERIC_SENSOR
| #define DEFINE_GENERIC_SENSOR | ( | class_name | ) |
Value:
protected: \
static mrpt::hwdrivers::CGenericSensor::CLASSINIT_GENERIC_SENSOR _init_##class_name;\
public: \
static mrpt::hwdrivers::TSensorClassId class##class_name; \
static mrpt::hwdrivers::CGenericSensor* CreateObject(); \
static void doRegister() \
{ CGenericSensor::registerClass( SENSOR_CLASS_ID( class_name ) ); }
A generic interface for a wide-variety of sensors designed to be used in the application RawLogGrabbe...
Definition: CGenericSensor.h:64
void BASE_IMPEXP registerClass(const mrpt::utils::TRuntimeClassId *pNewClass)
Register a class into the MRPT internal list of "CSerializable" descendents.
Definition: internal_class_registry.cpp:160
Auxiliary structure used for CSerializable runtime class ID support.
Definition: CGenericSensor.h:155
A structure for runtime ID class type information in the context of hwdrivers::CGenericSensor.
Definition: CGenericSensor.h:36
This declaration must be inserted in all CGenericSensor classes definition, within the class declaration.
Definition at line 252 of file CGenericSensor.h.
◆ IMPLEMENTS_GENERIC_SENSOR
| #define IMPLEMENTS_GENERIC_SENSOR | ( | class_name, | |
| NameSpace | |||
| ) |
Value:
mrpt::hwdrivers::CGenericSensor* NameSpace::class_name::CreateObject() \
mrpt::hwdrivers::TSensorClassId NameSpace::class_name::class##class_name = { \
#class_name, NameSpace::class_name::CreateObject }; \
const mrpt::hwdrivers::TSensorClassId* NameSpace::class_name::GetRuntimeClass() const \
{ return SENSOR_CLASS_ID(class_name); }
This must be inserted in all CGenericSensor classes implementation files:
Definition at line 264 of file CGenericSensor.h.
◆ SENSOR_CLASS_ID
| #define SENSOR_CLASS_ID | ( | class_name | ) | static_cast<const mrpt::hwdrivers::TSensorClassId*>(& mrpt::hwdrivers::class_name::class##class_name) |
Definition at line 244 of file CGenericSensor.h.
◆ SENSOR_IS_CLASS
| #define SENSOR_IS_CLASS | ( | ptrObj, | |
| class_name | |||
| ) | (ptrObj->GetRuntimeClass()==SENSOR_CLASS_ID(class_name)) |
Definition at line 247 of file CGenericSensor.h.