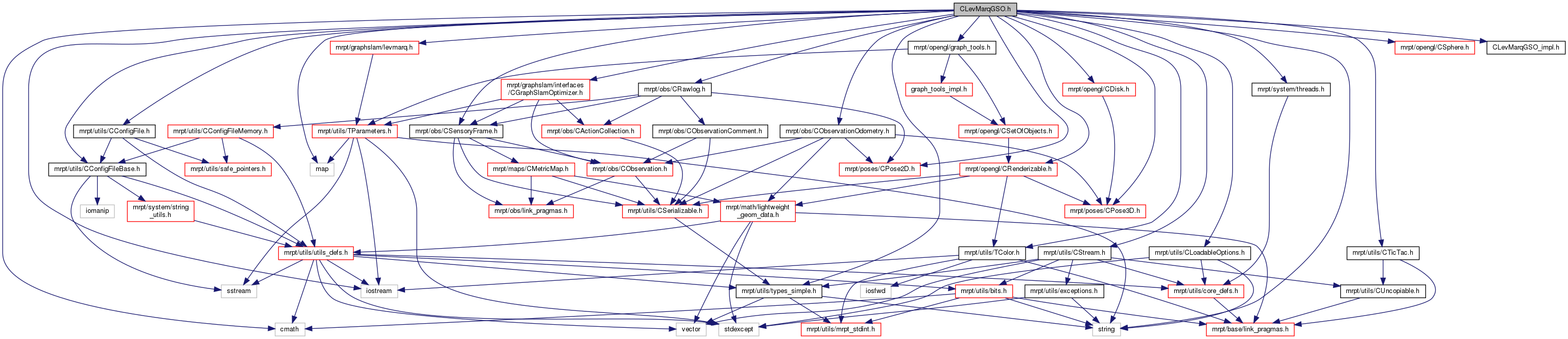
#include <mrpt/obs/CObservationOdometry.h>#include <mrpt/obs/CRawlog.h>#include <mrpt/obs/CSensoryFrame.h>#include <mrpt/utils/CLoadableOptions.h>#include <mrpt/utils/CConfigFile.h>#include <mrpt/utils/CConfigFileBase.h>#include <mrpt/utils/CStream.h>#include <mrpt/utils/CTicTac.h>#include <mrpt/utils/types_simple.h>#include <mrpt/utils/TColor.h>#include <mrpt/system/threads.h>#include <mrpt/opengl/graph_tools.h>#include <mrpt/opengl/CDisk.h>#include <mrpt/opengl/CSphere.h>#include <mrpt/opengl/CRenderizable.h>#include <mrpt/poses/CPose2D.h>#include <mrpt/poses/CPose3D.h>#include <mrpt/graphslam/levmarq.h>#include <mrpt/graphslam/interfaces/CGraphSlamOptimizer.h>#include <iostream>#include <string>#include <map>#include <cmath>#include "CLevMarqGSO_impl.h"
Include dependency graph for CLevMarqGSO.h:
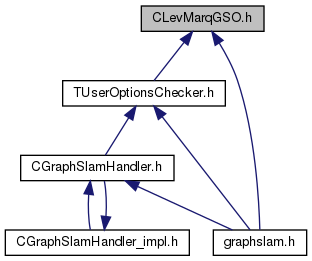
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T > |
| Levenberg-Marquardt non-linear graph slam optimization scheme. More... | |
| struct | mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::OptimizationParams |
| Struct for holding the optimization-related variables in a compact form. More... | |
| struct | mrpt::graphslam::optimizers::CLevMarqGSO< GRAPH_T >::GraphVisualizationParams |
| struct for holding the graph visualization-related variables in a compact form More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::graphslam | |
| SLAM methods related to graphs of pose constraints. | |
| mrpt::graphslam::optimizers | |