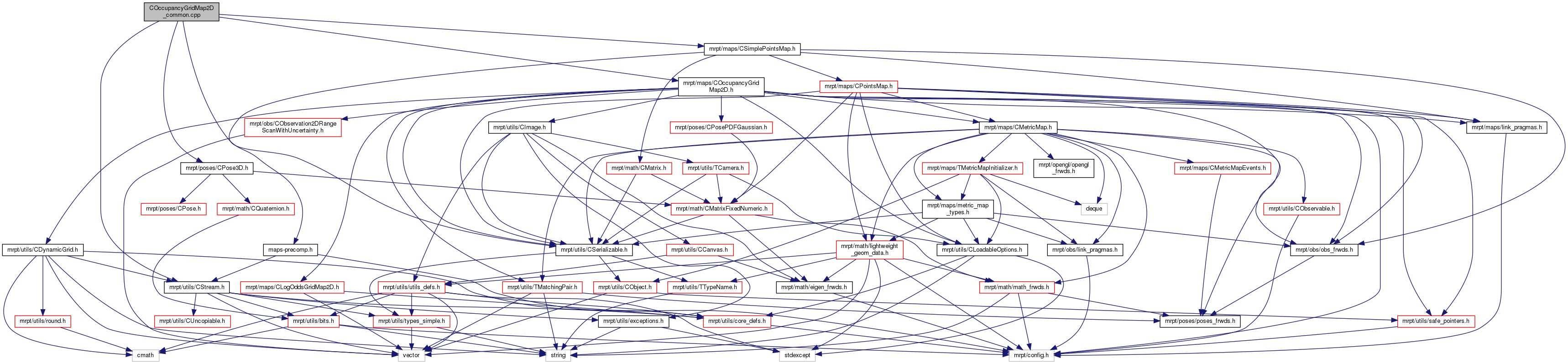
#include "maps-precomp.h"#include <mrpt/maps/COccupancyGridMap2D.h>#include <mrpt/maps/CSimplePointsMap.h>#include <mrpt/utils/CStream.h>#include <mrpt/poses/CPose3D.h>
Include dependency graph for COccupancyGridMap2D_common.cpp:
Go to the source code of this file.
Variables | |
| static const float | MAX_H = 0.69314718055994531f |
Variable Documentation
◆ MAX_H
|
static |
Definition at line 84 of file COccupancyGridMap2D_common.cpp.
Referenced by mrpt::maps::COccupancyGridMap2D::computeEntropy(), and mrpt::maps::COccupancyGridMap2D::updateCell().