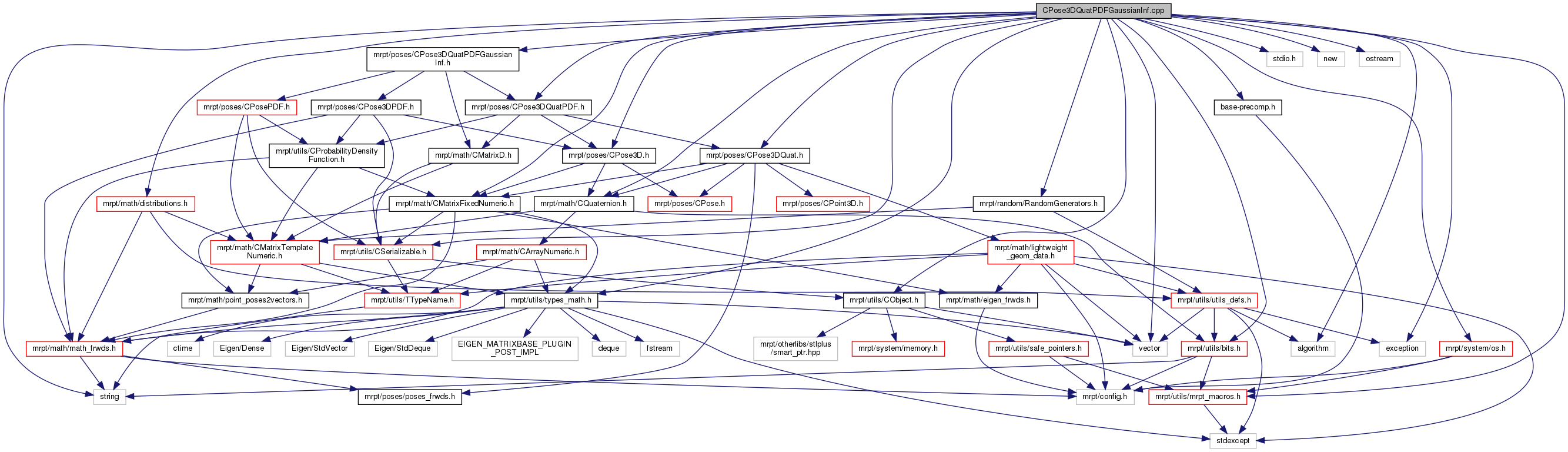
#include "base-precomp.h"#include <mrpt/poses/CPose3DQuatPDFGaussianInf.h>#include <mrpt/utils/types_math.h>#include <stdio.h>#include <algorithm>#include <exception>#include <new>#include <ostream>#include <string>#include <vector>#include <mrpt/math/CMatrixFixedNumeric.h>#include <mrpt/math/CQuaternion.h>#include <mrpt/poses/CPose3D.h>#include <mrpt/poses/CPose3DQuat.h>#include <mrpt/poses/CPose3DQuatPDF.h>#include <mrpt/random/RandomGenerators.h>#include <mrpt/utils/CObject.h>#include <mrpt/utils/CSerializable.h>#include <mrpt/utils/bits.h>#include <mrpt/utils/mrpt_macros.h>#include <mrpt/system/os.h>#include <mrpt/math/distributions.h>
Include dependency graph for CPose3DQuatPDFGaussianInf.cpp: