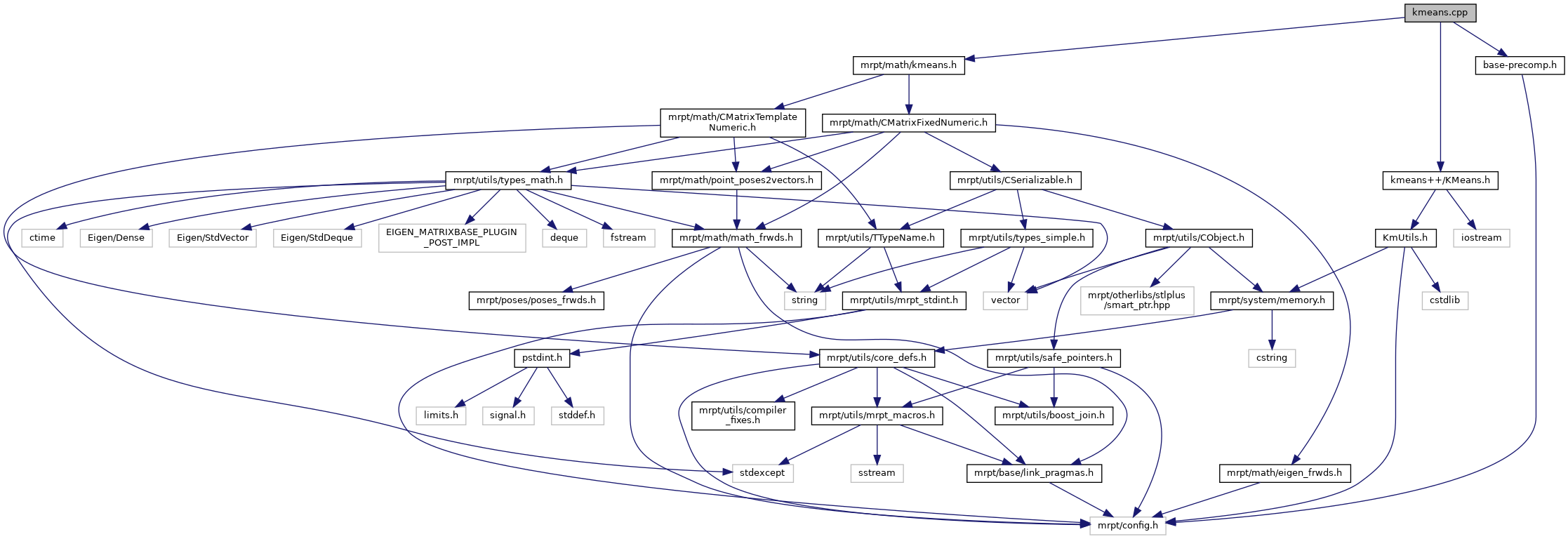
Include dependency graph for KMeans.cpp:
Go to the source code of this file.
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::math | |
| This base provides a set of functions for maths stuff. | |
| mrpt::math::detail | |
Functions | |
| template<> | |
| BASE_IMPEXP double | mrpt::math::detail::internal_kmeans< double > (const bool use_kmeansplusplus_method, const size_t nPoints, const size_t k, const size_t dims, const double *points, const size_t attempts, double *out_center, int *out_assignments) |
| template<> | |
| BASE_IMPEXP double | mrpt::math::detail::internal_kmeans< float > (const bool use_kmeansplusplus_method, const size_t nPoints, const size_t k, const size_t dims, const float *points, const size_t attempts, float *out_center, int *out_assignments) |