Detailed Description
template<class T>
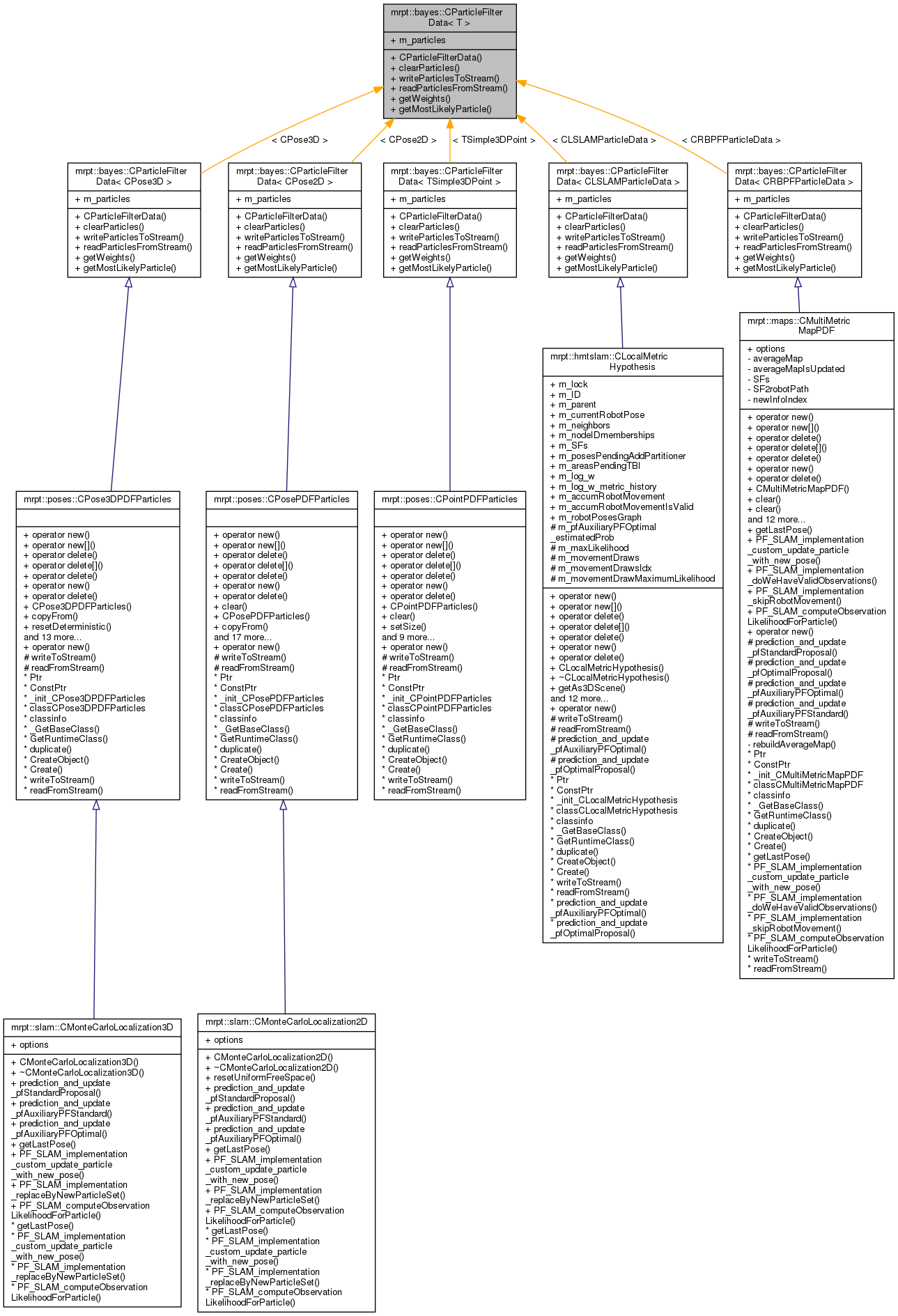
class mrpt::bayes::CParticleFilterData< T >
This template class declares the array of particles and its internal data, managing some memory-related issues and providing an easy implementation of virtual methods required for implementing a CParticleFilterCapable.
See also the methods in the base class CParticleFilterDataImpl<>.
Since CProbabilityParticle implements all the required operators, the member "m_particles" can be safely copied with "=" or copy constructor operators and new objects will be created internally instead of copying the internal pointers, which would lead to memory corruption.
Definition at line 170 of file CParticleFilterData.h.
#include <mrpt/bayes/CParticleFilterData.h>
Public Types | |
| typedef T | CParticleDataContent |
| This is the type inside the corresponding CParticleData class. More... | |
| typedef CProbabilityParticle< T > | CParticleData |
| Use this to refer to each element in the m_particles array. More... | |
| typedef std::deque< CParticleData > | CParticleList |
| Use this type to refer to the list of particles m_particles. More... | |
Public Member Functions | |
| CParticleFilterData () | |
| Default constructor. More... | |
| void | clearParticles () |
| Free the memory of all the particles and reset the array "m_particles" to length zero. More... | |
| template<class STREAM > | |
| void | writeParticlesToStream (STREAM &out) const |
| Dumps the sequence of particles and their weights to a stream (requires T implementing CSerializable). More... | |
| template<class STREAM > | |
| void | readParticlesFromStream (STREAM &in) |
| Reads the sequence of particles and their weights from a stream (requires T implementing CSerializable). More... | |
| void | getWeights (std::vector< double > &out_logWeights) const |
| Returns a vector with the sequence of the logaritmic weights of all the samples. More... | |
| const CParticleData * | getMostLikelyParticle () const |
| Returns the particle with the highest weight. More... | |
Public Attributes | |
| CParticleList | m_particles |
| The array of particles. More... | |
Member Typedef Documentation
◆ CParticleData
| typedef CProbabilityParticle<T> mrpt::bayes::CParticleFilterData< T >::CParticleData |
Use this to refer to each element in the m_particles array.
Definition at line 174 of file CParticleFilterData.h.
◆ CParticleDataContent
| typedef T mrpt::bayes::CParticleFilterData< T >::CParticleDataContent |
This is the type inside the corresponding CParticleData class.
Definition at line 173 of file CParticleFilterData.h.
◆ CParticleList
| typedef std::deque<CParticleData> mrpt::bayes::CParticleFilterData< T >::CParticleList |
Use this type to refer to the list of particles m_particles.
Definition at line 175 of file CParticleFilterData.h.
Constructor & Destructor Documentation
◆ CParticleFilterData()
|
inline |
Default constructor.
Definition at line 180 of file CParticleFilterData.h.
Member Function Documentation
◆ clearParticles()
|
inline |
Free the memory of all the particles and reset the array "m_particles" to length zero.
Definition at line 183 of file CParticleFilterData.h.
Referenced by mrpt::maps::CMultiMetricMapPDF::getEstimatedPosePDFAtTime(), and mrpt::bayes::CParticleFilterData< CRBPFParticleData >::readParticlesFromStream().
◆ getMostLikelyParticle()
|
inline |
Returns the particle with the highest weight.
Definition at line 240 of file CParticleFilterData.h.
Referenced by mrpt::hmtslam::CHMTSLAM::generateLogFiles().
◆ getWeights()
|
inline |
Returns a vector with the sequence of the logaritmic weights of all the samples.
Definition at line 227 of file CParticleFilterData.h.
Referenced by mrpt::maps::CBeaconMap::internal_insertObservation().
◆ readParticlesFromStream()
|
inline |
Reads the sequence of particles and their weights from a stream (requires T implementing CSerializable).
- See also
- writeParticlesToStream
Definition at line 207 of file CParticleFilterData.h.
◆ writeParticlesToStream()
|
inline |
Dumps the sequence of particles and their weights to a stream (requires T implementing CSerializable).
- See also
- readParticlesFromStream
Definition at line 192 of file CParticleFilterData.h.
Member Data Documentation
◆ m_particles
| CParticleList mrpt::bayes::CParticleFilterData< T >::m_particles |
The array of particles.
Definition at line 177 of file CParticleFilterData.h.
Referenced by mrpt::poses::CPosePDFParticles::append(), mrpt::hmtslam::CLSLAM_RBPF_2DLASER::auxiliarComputeObservationLikelihood(), mrpt::bayes::CParticleFilterData< CRBPFParticleData >::clearParticles(), mrpt::hmtslam::CHierarchicalMapMHPartition::computeCoordinatesTransformationBetweenNodes(), mrpt::obs::CActionRobotMovement3D::computeFromOdometry_model6DOF(), mrpt::obs::CActionRobotMovement2D::computeFromOdometry_modelThrun(), mrpt::hmtslam::CHierarchicalMapMHPartition::computeOverlapProbabilityBetweenNodes(), mrpt::poses::CPose3DPDFParticles::copyFrom(), mrpt::poses::CPosePDFParticles::copyFrom(), mrpt::poses::CPose3DPDF::createFrom2D(), mrpt::poses::CPoseInterpolatorBase< 3 >::filter(), mrpt::poses::CPosePDFGrid::getCovarianceAndMean(), mrpt::maps::CMultiMetricMapPDF::getEstimatedPosePDFAtTime(), mrpt::bayes::CParticleFilterData< CRBPFParticleData >::getMostLikelyParticle(), mrpt::hmtslam::CLocalMetricHypothesis::getPoseParticles(), mrpt::hmtslam::CLocalMetricHypothesis::getRelativePose(), mrpt::bayes::CParticleFilterData< CRBPFParticleData >::getWeights(), mrpt::maps::CBeaconMap::internal_computeObservationLikelihood(), mrpt::maps::CBeaconMap::internal_insertObservation(), mrpt::hmtslam::CHMTSLAM::LSLAM_process_message_from_AA(), mrpt::hmtslam::CHMTSLAM::perform_TLC(), mrpt::hmtslam::CLSLAM_RBPF_2DLASER::prediction_and_update_pfAuxiliaryPFOptimal(), mrpt::hmtslam::CLSLAM_RBPF_2DLASER::prediction_and_update_pfOptimalProposal(), mrpt::slam::CMetricMapBuilderRBPF::processActionObservation(), mrpt::hmtslam::CLSLAM_RBPF_2DLASER::processOneLMH(), mrpt::bayes::CParticleFilterData< CRBPFParticleData >::readParticlesFromStream(), mrpt::hmtslam::CLocalMetricHypothesis::updateAreaFromLMH(), and mrpt::bayes::CParticleFilterData< CRBPFParticleData >::writeParticlesToStream().