Detailed Description
template<class Derived, typename num_t = float, typename metric_t = nanoflann::L2_Simple_Adaptor<num_t,Derived>>
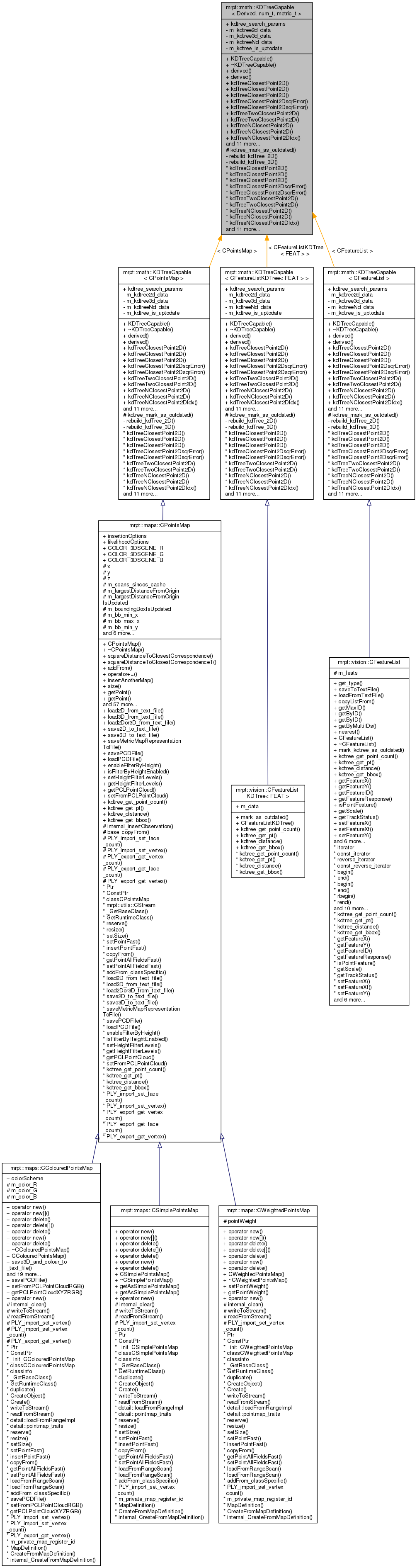
class mrpt::math::KDTreeCapable< Derived, num_t, metric_t >
A generic adaptor class for providing Nearest Neighbor (NN) lookup via the nanoflann library.
This makes use of the CRTP design pattern.
Derived classes must be aware of the need to call "kdtree_mark_as_outdated()" when the data points change to mark the cached KD-tree (an "index") as invalid, and also implement the following interface (note that these are not virtual functions due to the usage of CRTP):
The KD-tree index will be built on demand only upon call of any of the query methods provided by this class.
Notice that there is only ONE internal cached KD-tree, so if a method to query a 2D point is called, then another method for 3D points, then again the 2D method, three KD-trees will be built. So, try to group all the calls for a given dimensionality together or build different class instances for queries of each dimensionality, etc.
- See also
- See some of the derived classes for example implementations. See also the documentation of nanoflann
Definition at line 67 of file KDTreeCapable.h.
#include <mrpt/math/KDTreeCapable.h>
Classes | |
| struct | TKDTreeDataHolder |
| Internal structure with the KD-tree representation (mainly used to avoid copying pointers with the = operator) More... | |
| struct | TKDTreeSearchParams |
Public Types | |
| typedef KDTreeCapable< Derived, num_t, metric_t > | self_t |
Public Member Functions | |
| KDTreeCapable () | |
| Constructor. More... | |
| ~KDTreeCapable () | |
| Destructor (nothing needed to do here) More... | |
| const Derived & | derived () const |
| CRTP helper method. More... | |
| Derived & | derived () |
| CRTP helper method. More... | |
Public Attributes | |
| TKDTreeSearchParams | kdtree_search_params |
| Parameters to tune the ANN searches. More... | |
Public utility methods to query the KD-tree | |
| TKDTreeDataHolder< 2 > | m_kdtree2d_data |
| TKDTreeDataHolder< 3 > | m_kdtree3d_data |
| TKDTreeDataHolder | m_kdtreeNd_data |
| bool | m_kdtree_is_uptodate |
| whether the KD tree needs to be rebuilt or not. More... | |
| size_t | kdTreeClosestPoint2D (float x0, float y0, float &out_x, float &out_y, float &out_dist_sqr) const |
| KD Tree-based search for the closest point (only ONE) to some given 2D coordinates. More... | |
| size_t | kdTreeClosestPoint2D (float x0, float y0, float &out_dist_sqr) const |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| size_t | kdTreeClosestPoint2D (const TPoint2D &p0, TPoint2D &pOut, float &outDistSqr) const |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| float | kdTreeClosestPoint2DsqrError (float x0, float y0) const |
| Like kdTreeClosestPoint2D, but just return the square error from some point to its closest neighbor. More... | |
| float | kdTreeClosestPoint2DsqrError (const TPoint2D &p0) const |
| void | kdTreeTwoClosestPoint2D (float x0, float y0, float &out_x1, float &out_y1, float &out_x2, float &out_y2, float &out_dist_sqr1, float &out_dist_sqr2) const |
| KD Tree-based search for the TWO closest point to some given 2D coordinates. More... | |
| void | kdTreeTwoClosestPoint2D (const TPoint2D &p0, TPoint2D &pOut1, TPoint2D &pOut2, float &outDistSqr1, float &outDistSqr2) const |
| std::vector< size_t > | kdTreeNClosestPoint2D (float x0, float y0, size_t knn, std::vector< float > &out_x, std::vector< float > &out_y, std::vector< float > &out_dist_sqr) const |
| KD Tree-based search for the N closest point to some given 2D coordinates. More... | |
| std::vector< size_t > | kdTreeNClosestPoint2D (const TPoint2D &p0, size_t N, std::vector< TPoint2D > &pOut, std::vector< float > &outDistSqr) const |
| void | kdTreeNClosestPoint2DIdx (float x0, float y0, size_t knn, std::vector< size_t > &out_idx, std::vector< float > &out_dist_sqr) const |
| KD Tree-based search for the N closest point to some given 2D coordinates and returns their indexes. More... | |
| void | kdTreeNClosestPoint2DIdx (const TPoint2D &p0, size_t N, std::vector< size_t > &outIdx, std::vector< float > &outDistSqr) const |
| size_t | kdTreeClosestPoint3D (float x0, float y0, float z0, float &out_x, float &out_y, float &out_z, float &out_dist_sqr) const |
| KD Tree-based search for the closest point (only ONE) to some given 3D coordinates. More... | |
| size_t | kdTreeClosestPoint3D (float x0, float y0, float z0, float &out_dist_sqr) const |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| size_t | kdTreeClosestPoint3D (const TPoint3D &p0, TPoint3D &pOut, float &outDistSqr) const |
| This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts. More... | |
| void | kdTreeNClosestPoint3D (float x0, float y0, float z0, size_t knn, std::vector< float > &out_x, std::vector< float > &out_y, std::vector< float > &out_z, std::vector< float > &out_dist_sqr) const |
| KD Tree-based search for the N closest points to some given 3D coordinates. More... | |
| void | kdTreeNClosestPoint3DWithIdx (float x0, float y0, float z0, size_t knn, std::vector< float > &out_x, std::vector< float > &out_y, std::vector< float > &out_z, std::vector< size_t > &out_idx, std::vector< float > &out_dist_sqr) const |
| KD Tree-based search for the N closest points to some given 3D coordinates. More... | |
| void | kdTreeNClosestPoint3D (const TPoint3D &p0, size_t N, std::vector< TPoint3D > &pOut, std::vector< float > &outDistSqr) const |
| size_t | kdTreeRadiusSearch3D (const num_t x0, const num_t y0, const num_t z0, const num_t maxRadiusSqr, std::vector< std::pair< size_t, num_t > > &out_indices_dist) const |
| KD Tree-based search for all the points within a given radius of some 3D point. More... | |
| size_t | kdTreeRadiusSearch2D (const num_t x0, const num_t y0, const num_t maxRadiusSqr, std::vector< std::pair< size_t, num_t > > &out_indices_dist) const |
| KD Tree-based search for all the points within a given radius of some 2D point. More... | |
| void | kdTreeNClosestPoint3DIdx (float x0, float y0, float z0, size_t knn, std::vector< size_t > &out_idx, std::vector< float > &out_dist_sqr) const |
| KD Tree-based search for the N closest point to some given 3D coordinates and returns their indexes. More... | |
| void | kdTreeNClosestPoint3DIdx (const TPoint3D &p0, size_t N, std::vector< size_t > &outIdx, std::vector< float > &outDistSqr) const |
| void | kdtree_mark_as_outdated () const |
| To be called by child classes when KD tree data changes. More... | |
| void | rebuild_kdTree_2D () const |
| Rebuild, if needed the KD-tree for 2D (nDims=2), 3D (nDims=3), ... asking the child class for the data points. More... | |
| void | rebuild_kdTree_3D () const |
| Rebuild, if needed the KD-tree for 2D (nDims=2), 3D (nDims=3), ... asking the child class for the data points. More... | |
Member Typedef Documentation
◆ self_t
| typedef KDTreeCapable<Derived,num_t,metric_t> mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::self_t |
Definition at line 71 of file KDTreeCapable.h.
Constructor & Destructor Documentation
◆ KDTreeCapable()
|
inline |
Constructor.
Definition at line 75 of file KDTreeCapable.h.
◆ ~KDTreeCapable()
|
inline |
Destructor (nothing needed to do here)
Definition at line 78 of file KDTreeCapable.h.
Member Function Documentation
◆ derived() [1/2]
|
inline |
CRTP helper method.
Definition at line 83 of file KDTreeCapable.h.
◆ derived() [2/2]
|
inline |
CRTP helper method.
Definition at line 81 of file KDTreeCapable.h.
Referenced by mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeClosestPoint2D(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeClosestPoint3D(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeNClosestPoint2D(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeNClosestPoint3D(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeNClosestPoint3DWithIdx(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeTwoClosestPoint2D(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::rebuild_kdTree_2D(), and mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::rebuild_kdTree_3D().
◆ kdtree_mark_as_outdated()
|
inlineprotected |
To be called by child classes when KD tree data changes.
Definition at line 672 of file KDTreeCapable.h.
References mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::m_kdtree_is_uptodate.
◆ kdTreeClosestPoint2D() [1/3]
|
inline |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 167 of file KDTreeCapable.h.
References mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeClosestPoint2D(), mrpt::math::TPoint2D::x, and mrpt::math::TPoint2D::y.
◆ kdTreeClosestPoint2D() [2/3]
|
inline |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 144 of file KDTreeCapable.h.
References mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::index, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::m_kdtree2d_data, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::m_num_points, MRPT_END, MRPT_START, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::query_point, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::rebuild_kdTree_2D(), and THROW_EXCEPTION.
◆ kdTreeClosestPoint2D() [3/3]
|
inline |
KD Tree-based search for the closest point (only ONE) to some given 2D coordinates.
This method automatically build the "m_kdtree_data" structure when:
- It is called for the first time
- The map has changed
- The KD-tree was build for 3D.
- Parameters
-
x0 The X coordinate of the query. y0 The Y coordinate of the query. out_x The X coordinate of the found closest correspondence. out_y The Y coordinate of the found closest correspondence. out_dist_sqr The square distance between the query and the returned point.
- Returns
- The index of the closest point in the map array.
Definition at line 114 of file KDTreeCapable.h.
References mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::derived(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::index, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::m_kdtree2d_data, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::m_num_points, MRPT_END, MRPT_START, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::query_point, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::rebuild_kdTree_2D(), and THROW_EXCEPTION.
Referenced by mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeClosestPoint2D(), and mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeClosestPoint2DsqrError().
◆ kdTreeClosestPoint2DsqrError() [1/2]
|
inline |
Definition at line 186 of file KDTreeCapable.h.
References mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeClosestPoint2DsqrError(), mrpt::math::TPoint2D::x, and mrpt::math::TPoint2D::y.
◆ kdTreeClosestPoint2DsqrError() [2/2]
|
inline |
Like kdTreeClosestPoint2D, but just return the square error from some point to its closest neighbor.
Definition at line 177 of file KDTreeCapable.h.
References mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeClosestPoint2D().
Referenced by mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeClosestPoint2DsqrError(), mrpt::vision::detail::trackFeatures_addNewFeats< CFeatureList >(), and mrpt::vision::detail::trackFeatures_addNewFeats_simple_list().
◆ kdTreeClosestPoint3D() [1/3]
|
inline |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 432 of file KDTreeCapable.h.
References mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeClosestPoint3D(), mrpt::math::TPoint3D::x, mrpt::math::TPoint3D::y, and mrpt::math::TPoint3D::z.
◆ kdTreeClosestPoint3D() [2/3]
|
inline |
This is an overloaded member function, provided for convenience. It differs from the above function only in what argument(s) it accepts.
Definition at line 406 of file KDTreeCapable.h.
References mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::index, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::m_kdtree3d_data, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::m_num_points, MRPT_END, MRPT_START, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::query_point, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::rebuild_kdTree_3D(), and THROW_EXCEPTION.
◆ kdTreeClosestPoint3D() [3/3]
|
inline |
KD Tree-based search for the closest point (only ONE) to some given 3D coordinates.
This method automatically build the "m_kdtree_data" structure when:
- It is called for the first time
- The map has changed
- The KD-tree was build for 2D.
- Parameters
-
x0 The X coordinate of the query. y0 The Y coordinate of the query. z0 The Z coordinate of the query. out_x The X coordinate of the found closest correspondence. out_y The Y coordinate of the found closest correspondence. out_z The Z coordinate of the found closest correspondence. out_dist_sqr The square distance between the query and the returned point.
- Returns
- The index of the closest point in the map array.
- See also
- kdTreeClosestPoint2D
Definition at line 372 of file KDTreeCapable.h.
References mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::derived(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::index, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::m_kdtree3d_data, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::m_num_points, MRPT_END, MRPT_START, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::query_point, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::rebuild_kdTree_3D(), and THROW_EXCEPTION.
Referenced by mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeClosestPoint3D().
◆ kdTreeNClosestPoint2D() [1/2]
|
inline |
Definition at line 304 of file KDTreeCapable.h.
References mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeNClosestPoint2D(), mrpt::math::TPoint2D::x, and mrpt::math::TPoint2D::y.
◆ kdTreeNClosestPoint2D() [2/2]
|
inline |
KD Tree-based search for the N closest point to some given 2D coordinates.
This method automatically build the "m_kdtree_data" structure when:
- It is called for the first time
- The map has changed
- The KD-tree was build for 3D.
- Parameters
-
x0 The X coordinate of the query. y0 The Y coordinate of the query. N The number of closest points to search. out_x The vector containing the X coordinates of the correspondences. out_y The vector containing the Y coordinates of the correspondences. out_dist_sqr The vector containing the square distance between the query and the returned points.
- Returns
- The list of indices
Definition at line 271 of file KDTreeCapable.h.
References mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::derived(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::index, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::m_kdtree2d_data, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::m_num_points, MRPT_END, MRPT_START, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::query_point, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::rebuild_kdTree_2D(), and THROW_EXCEPTION.
Referenced by mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeNClosestPoint2D().
◆ kdTreeNClosestPoint2DIdx() [1/2]
|
inline |
Definition at line 351 of file KDTreeCapable.h.
References mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeNClosestPoint2DIdx(), mrpt::math::TPoint2D::x, and mrpt::math::TPoint2D::y.
◆ kdTreeNClosestPoint2DIdx() [2/2]
|
inline |
KD Tree-based search for the N closest point to some given 2D coordinates and returns their indexes.
This method automatically build the "m_kdtree_data" structure when:
- It is called for the first time
- The map has changed
- The KD-tree was build for 3D.
- Parameters
-
x0 The X coordinate of the query. y0 The Y coordinate of the query. N The number of closest points to search. out_idx The indexes of the found closest correspondence. out_dist_sqr The square distance between the query and the returned point.
- See also
- kdTreeClosestPoint2D
Definition at line 329 of file KDTreeCapable.h.
References mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::index, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::m_kdtree2d_data, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::m_num_points, MRPT_END, MRPT_START, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::query_point, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::rebuild_kdTree_2D(), and THROW_EXCEPTION.
Referenced by mrpt::slam::CGridMapAligner::AlignPDF_robustMatch(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeNClosestPoint2DIdx(), and mrpt::vision::matchMultiResolutionFeatures().
◆ kdTreeNClosestPoint3D() [1/2]
|
inline |
Definition at line 551 of file KDTreeCapable.h.
References mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeNClosestPoint3D(), mrpt::math::TPoint3D::x, mrpt::math::TPoint3D::y, and mrpt::math::TPoint3D::z.
◆ kdTreeNClosestPoint3D() [2/2]
|
inline |
KD Tree-based search for the N closest points to some given 3D coordinates.
This method automatically build the "m_kdtree_data" structure when:
- It is called for the first time
- The map has changed
- The KD-tree was build for 2D.
- Parameters
-
x0 The X coordinate of the query. y0 The Y coordinate of the query. z0 The Z coordinate of the query. N The number of closest points to search. out_x The vector containing the X coordinates of the correspondences. out_y The vector containing the Y coordinates of the correspondences. out_z The vector containing the Z coordinates of the correspondences. out_dist_sqr The vector containing the square distance between the query and the returned points.
- See also
- kdTreeNClosestPoint2D
Definition at line 458 of file KDTreeCapable.h.
References mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::derived(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::index, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::m_kdtree3d_data, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::m_num_points, MRPT_END, MRPT_START, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::query_point, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::rebuild_kdTree_3D(), and THROW_EXCEPTION.
Referenced by mrpt::maps::CPointCloudFilterByDistance::filter(), and mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeNClosestPoint3D().
◆ kdTreeNClosestPoint3DIdx() [1/2]
|
inline |
Definition at line 664 of file KDTreeCapable.h.
References mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeNClosestPoint3DIdx(), mrpt::math::TPoint3D::x, mrpt::math::TPoint3D::y, and mrpt::math::TPoint3D::z.
◆ kdTreeNClosestPoint3DIdx() [2/2]
|
inline |
KD Tree-based search for the N closest point to some given 3D coordinates and returns their indexes.
This method automatically build the "m_kdtree_data" structure when:
- It is called for the first time
- The map has changed
- The KD-tree was build for 2D.
- Parameters
-
x0 The X coordinate of the query. y0 The Y coordinate of the query. z0 The Z coordinate of the query. N The number of closest points to search. out_idx The indexes of the found closest correspondence. out_dist_sqr The square distance between the query and the returned point.
- See also
- kdTreeClosestPoint2D, kdTreeRadiusSearch3D
Definition at line 640 of file KDTreeCapable.h.
References mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::index, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::m_kdtree3d_data, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::m_num_points, MRPT_END, MRPT_START, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::query_point, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::rebuild_kdTree_3D(), and THROW_EXCEPTION.
Referenced by mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeNClosestPoint3DIdx().
◆ kdTreeNClosestPoint3DWithIdx()
|
inline |
KD Tree-based search for the N closest points to some given 3D coordinates.
This method automatically build the "m_kdtree_data" structure when:
- It is called for the first time
- The map has changed
- The KD-tree was build for 2D.
- Parameters
-
x0 The X coordinate of the query. y0 The Y coordinate of the query. z0 The Z coordinate of the query. N The number of closest points to search. out_x The vector containing the X coordinates of the correspondences. out_y The vector containing the Y coordinates of the correspondences. out_z The vector containing the Z coordinates of the correspondences. out_idx The vector containing the indexes of the correspondences. out_dist_sqr The vector containing the square distance between the query and the returned points.
- See also
- kdTreeNClosestPoint2D
Definition at line 513 of file KDTreeCapable.h.
References mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::derived(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::index, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::m_kdtree3d_data, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::m_num_points, MRPT_END, MRPT_START, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::query_point, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::rebuild_kdTree_3D(), and THROW_EXCEPTION.
◆ kdTreeRadiusSearch2D()
|
inline |
KD Tree-based search for all the points within a given radius of some 2D point.
This method automatically build the "m_kdtree_data" structure when:
- It is called for the first time
- The map has changed
- The KD-tree was build for 3D.
- Parameters
-
x0 The X coordinate of the query. y0 The Y coordinate of the query. maxRadiusSqr The square of the desired search radius. out_indices_dist The output list, with pairs of indeces/squared distances for the found correspondences.
- Returns
- Number of found points.
Definition at line 608 of file KDTreeCapable.h.
References mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::index, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::m_kdtree2d_data, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::m_num_points, MRPT_END, MRPT_START, and mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::rebuild_kdTree_2D().
Referenced by ransac_data_assoc_run().
◆ kdTreeRadiusSearch3D()
|
inline |
KD Tree-based search for all the points within a given radius of some 3D point.
This method automatically build the "m_kdtree_data" structure when:
- It is called for the first time
- The map has changed
- The KD-tree was build for 2D.
- Parameters
-
x0 The X coordinate of the query. y0 The Y coordinate of the query. z0 The Z coordinate of the query. maxRadiusSqr The square of the desired search radius. out_indices_dist The output list, with pairs of indeces/squared distances for the found correspondences.
- Returns
- Number of found points.
Definition at line 577 of file KDTreeCapable.h.
References mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::index, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::m_kdtree3d_data, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::m_num_points, MRPT_END, MRPT_START, and mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::rebuild_kdTree_3D().
◆ kdTreeTwoClosestPoint2D() [1/2]
|
inline |
Definition at line 244 of file KDTreeCapable.h.
References mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeTwoClosestPoint2D(), mrpt::math::TPoint2D::x, and mrpt::math::TPoint2D::y.
◆ kdTreeTwoClosestPoint2D() [2/2]
|
inline |
KD Tree-based search for the TWO closest point to some given 2D coordinates.
This method automatically build the "m_kdtree_data" structure when:
- It is called for the first time
- The map has changed
- The KD-tree was build for 3D.
- Parameters
-
x0 The X coordinate of the query. y0 The Y coordinate of the query. out_x1 The X coordinate of the first correspondence. out_y1 The Y coordinate of the first correspondence. out_x2 The X coordinate of the second correspondence. out_y2 The Y coordinate of the second correspondence. out_dist_sqr1 The square distance between the query and the first returned point. out_dist_sqr2 The square distance between the query and the second returned point.
- See also
- kdTreeClosestPoint2D
Definition at line 207 of file KDTreeCapable.h.
References mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::derived(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::index, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::m_kdtree2d_data, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::m_num_points, MRPT_END, MRPT_START, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::query_point, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::rebuild_kdTree_2D(), and THROW_EXCEPTION.
Referenced by mrpt::slam::CICP::ICP_Method_LM(), and mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeTwoClosestPoint2D().
◆ rebuild_kdTree_2D()
|
inlineprivate |
Rebuild, if needed the KD-tree for 2D (nDims=2), 3D (nDims=3), ... asking the child class for the data points.
Definition at line 712 of file KDTreeCapable.h.
References mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::clear(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::derived(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::index, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdtree_search_params, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeSearchParams::leaf_max_size, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::m_dim, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::m_kdtree2d_data, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::m_kdtree3d_data, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::m_kdtree_is_uptodate, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::m_kdtreeNd_data, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::m_num_points, and mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::query_point.
Referenced by mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeClosestPoint2D(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeNClosestPoint2D(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeNClosestPoint2DIdx(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeRadiusSearch2D(), and mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeTwoClosestPoint2D().
◆ rebuild_kdTree_3D()
|
inlineprivate |
Rebuild, if needed the KD-tree for 2D (nDims=2), 3D (nDims=3), ... asking the child class for the data points.
Definition at line 737 of file KDTreeCapable.h.
References mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::clear(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::derived(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::index, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdtree_search_params, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeSearchParams::leaf_max_size, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::m_dim, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::m_kdtree2d_data, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::m_kdtree3d_data, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::m_kdtree_is_uptodate, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::m_kdtreeNd_data, mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::m_num_points, and mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::TKDTreeDataHolder< _DIM >::query_point.
Referenced by mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeClosestPoint3D(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeNClosestPoint3D(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeNClosestPoint3DIdx(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeNClosestPoint3DWithIdx(), and mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeRadiusSearch3D().
Member Data Documentation
◆ kdtree_search_params
| TKDTreeSearchParams mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdtree_search_params |
Parameters to tune the ANN searches.
Definition at line 94 of file KDTreeCapable.h.
Referenced by mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::rebuild_kdTree_2D(), and mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::rebuild_kdTree_3D().
◆ m_kdtree2d_data
|
mutableprivate |
Definition at line 706 of file KDTreeCapable.h.
Referenced by mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeClosestPoint2D(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeNClosestPoint2D(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeNClosestPoint2DIdx(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeRadiusSearch2D(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeTwoClosestPoint2D(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::rebuild_kdTree_2D(), and mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::rebuild_kdTree_3D().
◆ m_kdtree3d_data
|
mutableprivate |
Definition at line 707 of file KDTreeCapable.h.
Referenced by mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeClosestPoint3D(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeNClosestPoint3D(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeNClosestPoint3DIdx(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeNClosestPoint3DWithIdx(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdTreeRadiusSearch3D(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::rebuild_kdTree_2D(), and mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::rebuild_kdTree_3D().
◆ m_kdtree_is_uptodate
|
mutableprivate |
whether the KD tree needs to be rebuilt or not.
Definition at line 709 of file KDTreeCapable.h.
Referenced by mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::kdtree_mark_as_outdated(), mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::rebuild_kdTree_2D(), and mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::rebuild_kdTree_3D().
◆ m_kdtreeNd_data
|
mutableprivate |
Definition at line 708 of file KDTreeCapable.h.
Referenced by mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::rebuild_kdTree_2D(), and mrpt::math::KDTreeCapable< Derived, num_t, metric_t >::rebuild_kdTree_3D().