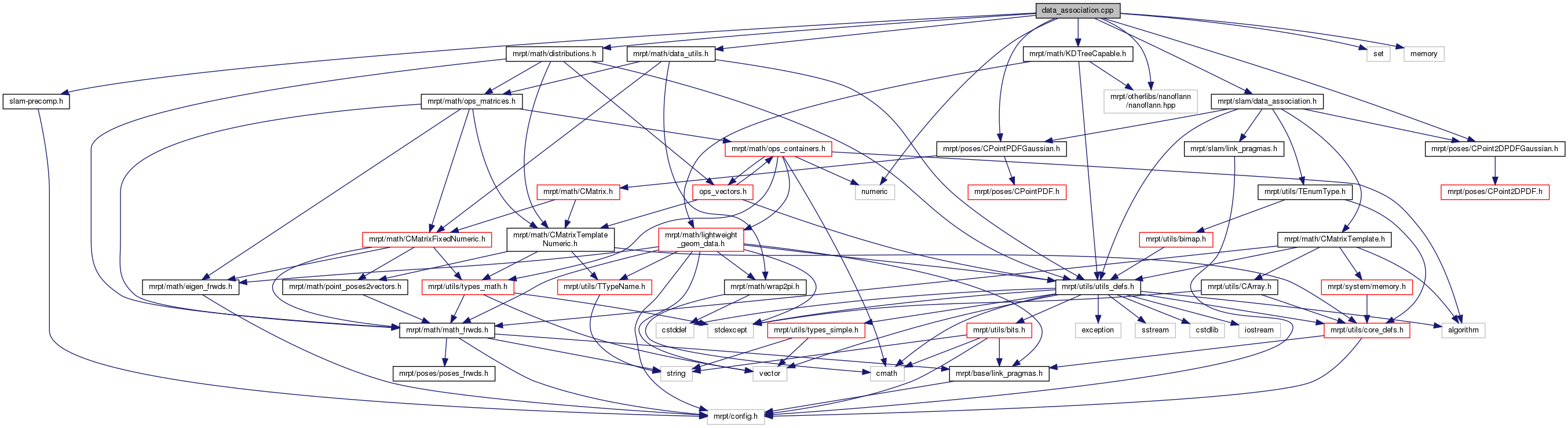
#include "slam-precomp.h"
#include <mrpt/slam/data_association.h>
#include <mrpt/math/distributions.h>
#include <mrpt/math/data_utils.h>
#include <mrpt/poses/CPointPDFGaussian.h>
#include <mrpt/poses/CPoint2DPDFGaussian.h>
#include <set>
#include <numeric>
#include <memory>
#include <mrpt/otherlibs/nanoflann/nanoflann.hpp>
#include <mrpt/math/KDTreeCapable.h>
Go to the source code of this file.
|
| | mrpt |
| | This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries.
|
| |
| | mrpt::slam |
| |
|
| template<typename T , TDataAssociationMetric METRIC> |
| double | mrpt::slam::joint_pdf_metric (const CMatrixTemplateNumeric< T > &Z_observations_mean, const CMatrixTemplateNumeric< T > &Y_predictions_mean, const CMatrixTemplateNumeric< T > &Y_predictions_cov, const TAuxDataRecursiveJCBB &info, const TDataAssociationResults &aux_data) |
| | Computes the joint distance metric (mahalanobis or matching likelihood) between two a set of associations. More...
|
| |
| template<TDataAssociationMetric METRIC> |
| bool | mrpt::slam::isCloser (const double v1, const double v2) |
| |
| template<> |
| bool | mrpt::slam::isCloser< metricMaha > (const double v1, const double v2) |
| |
| template<> |
| bool | mrpt::slam::isCloser< metricML > (const double v1, const double v2) |
| |
| template<typename T , TDataAssociationMetric METRIC> |
| void | mrpt::slam::JCBB_recursive (const mrpt::math::CMatrixTemplateNumeric< T > &Z_observations_mean, const mrpt::math::CMatrixTemplateNumeric< T > &Y_predictions_mean, const mrpt::math::CMatrixTemplateNumeric< T > &Y_predictions_cov, TDataAssociationResults &results, const TAuxDataRecursiveJCBB &info, const observation_index_t curObsIdx) |
| |