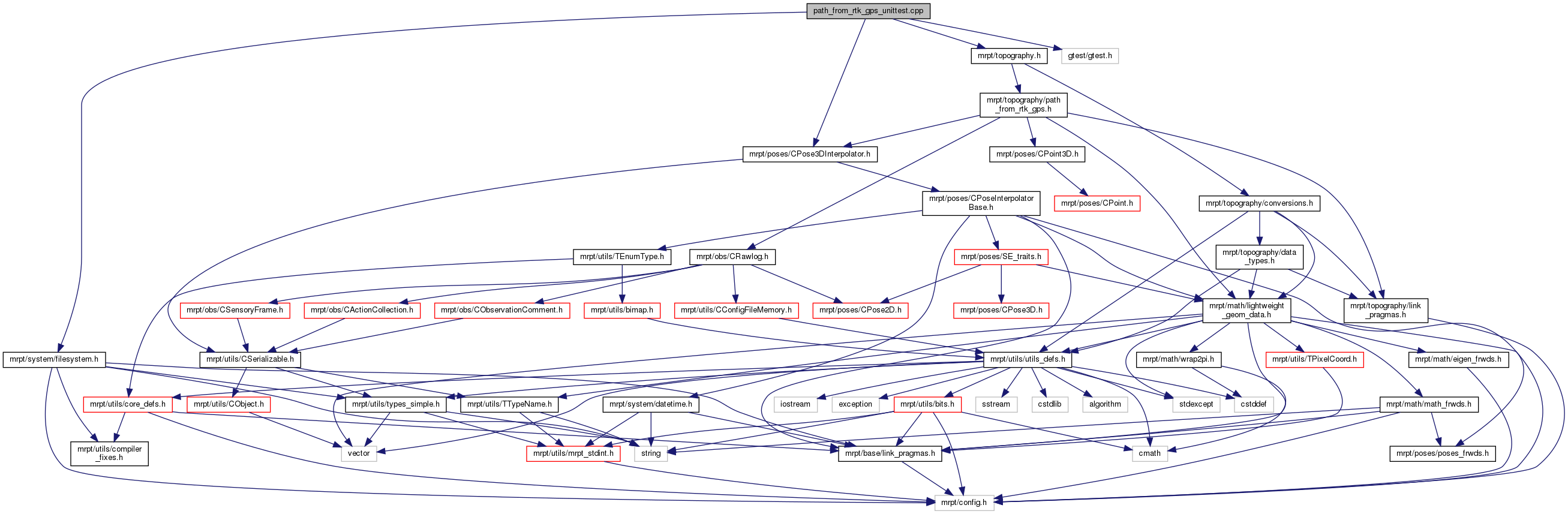
#include <mrpt/topography.h>#include <mrpt/poses/CPose3DInterpolator.h>#include <mrpt/system/filesystem.h>#include <gtest/gtest.h>
Include dependency graph for path_from_rtk_gps_unittest.cpp:
Go to the source code of this file.
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::utils | |
| Classes for serialization, sockets, ini-file manipulation, streams, list of properties-values, timewatch, extensions to STL. | |
Functions | |
| TEST (TopographyReconstructPathFrom3RTK, sampleDataset) | |
Function Documentation
◆ TEST()
| TEST | ( | TopographyReconstructPathFrom3RTK | , |
| sampleDataset | |||
| ) |
Definition at line 30 of file path_from_rtk_gps_unittest.cpp.
References mrpt::system::fileExists(), mrpt::poses::CPose3D::getAs12Vector(), mrpt::poses::CPoseInterpolatorBase< DIM >::interpolate(), mrpt::obs::CRawlog::loadFromRawLogFile(), mrpt::utils::MRPT_GLOBAL_UNITTEST_SRC_DIR, mrpt::topography::path_from_rtk_gps(), mrpt::poses::CPoseInterpolatorBase< DIM >::size(), mrpt::obs::CRawlog::size(), mrpt::math::sum(), and mrpt::system::time_tToTimestamp().