#include <mrpt/utils/aligned_containers.h>#include <mrpt/utils/CImage.h>#include <mrpt/utils/CLoadableOptions.h>#include <mrpt/utils/TMatchingPair.h>#include <mrpt/vision/link_pragmas.h>
Include dependency graph for vision/include/mrpt/vision/types.h:
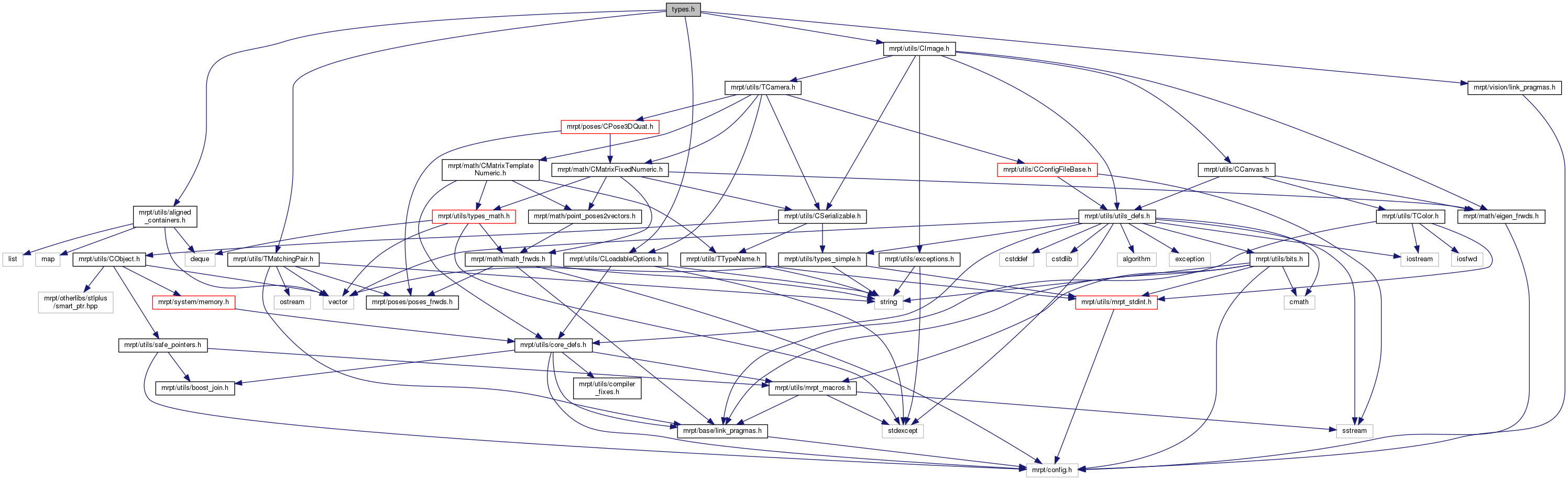
This graph shows which files directly or indirectly include this file:

Go to the source code of this file.
Classes | |
| struct | mrpt::vision::TFeatureObservation |
| One feature observation entry, used within sequences with TSequenceFeatureObservations. More... | |
| struct | mrpt::vision::TRelativeFeaturePos |
| One relative feature observation entry, used with some relative bundle-adjustment functions. More... | |
| struct | mrpt::vision::TSequenceFeatureObservations |
| A complete sequence of observations of features from different camera frames (poses). More... | |
| struct | mrpt::vision::TStereoSystemParams |
| Parameters associated to a stereo system. More... | |
| struct | mrpt::vision::TROI |
| A structure for storing a 3D ROI. More... | |
| struct | mrpt::vision::TImageROI |
| A structure for defining a ROI within an image. More... | |
| struct | mrpt::vision::TMatchingOptions |
| A structure containing options for the matching. More... | |
| struct | mrpt::vision::TMultiResMatchingOutput |
| Struct containing the output after matching multi-resolution SIFT-like descriptors. More... | |
| struct | mrpt::vision::TMultiResDescMatchOptions |
| Struct containing the options when matching multi-resolution SIFT-like descriptors. More... | |
| struct | mrpt::vision::TMultiResDescOptions |
| Struct containing the options when computing the multi-resolution SIFT-like descriptors. More... | |
Namespaces | |
| mrpt | |
| This is the global namespace for all Mobile Robot Programming Toolkit (MRPT) libraries. | |
| mrpt::vision | |
| Classes for computer vision, detectors, features, etc. | |
Macros | |
| #define | COPY_MEMBER(_m) this->_m = o._m; |
| #define | CHECK_MEMBER(_m) this->_m == o._m |
Typedefs | |
| typedef uint64_t | mrpt::vision::TFeatureID |
| Definition of a feature ID. More... | |
| typedef uint64_t | mrpt::vision::TLandmarkID |
| Unique IDs for landmarks. More... | |
| typedef uint64_t | mrpt::vision::TCameraPoseID |
| Unique IDs for camera frames (poses) More... | |
| typedef mrpt::aligned_containers< TCameraPoseID, mrpt::poses::CPose3D >::map_t | mrpt::vision::TFramePosesMap |
| A list of camera frames (6D poses) indexed by unique IDs. More... | |
| typedef mrpt::aligned_containers< mrpt::poses::CPose3D >::vector_t | mrpt::vision::TFramePosesVec |
| A list of camera frames (6D poses), which assumes indexes are unique, consecutive IDs. More... | |
| typedef std::map< TLandmarkID, mrpt::math::TPoint3D > | mrpt::vision::TLandmarkLocationsMap |
| A list of landmarks (3D points) indexed by unique IDs. More... | |
| typedef std::vector< mrpt::math::TPoint3D > | mrpt::vision::TLandmarkLocationsVec |
| A list of landmarks (3D points), which assumes indexes are unique, consecutive IDs. More... | |
| typedef std::map< mrpt::vision::TFeatureID, TRelativeFeaturePos > | mrpt::vision::TRelativeFeaturePosMap |
| An index of feature IDs and their relative locations. More... | |
Macro Definition Documentation
◆ CHECK_MEMBER
| #define CHECK_MEMBER | ( | _m | ) | this->_m == o._m |
Definition at line 341 of file vision/include/mrpt/vision/types.h.
◆ COPY_MEMBER
| #define COPY_MEMBER | ( | _m | ) | this->_m = o._m; |
Definition at line 340 of file vision/include/mrpt/vision/types.h.