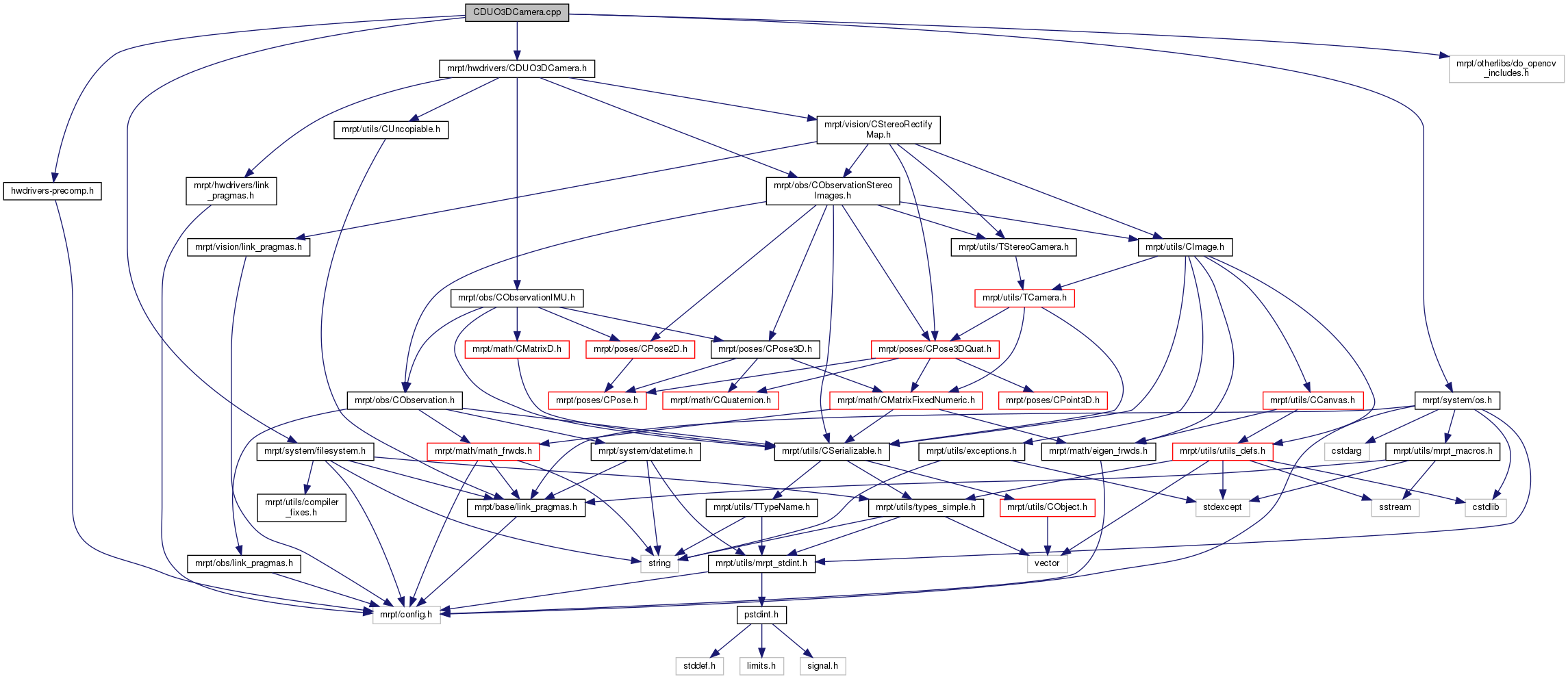
#include "hwdrivers-precomp.h"#include <mrpt/system/os.h>#include <mrpt/system/filesystem.h>#include <mrpt/hwdrivers/CDUO3DCamera.h>#include <mrpt/otherlibs/do_opencv_includes.h>
Include dependency graph for CDUO3DCamera.cpp:
Go to the source code of this file.
Classes | |
| struct | TDUOParams |
Macros | |
| #define | M_DUO_PTR ( reinterpret_cast<DUOInstance*>(m_duo)) |
| #define | M_DUO_VALUE (*M_DUO_PTR) |
Variables | |
| std::map< const mrpt::hwdrivers::TCaptureOptions_DUO3D *, TDUOParams > | duo_params |
Macro Definition Documentation
◆ M_DUO_PTR
| #define M_DUO_PTR ( reinterpret_cast<DUOInstance*>(m_duo)) |
Definition at line 36 of file CDUO3DCamera.cpp.
◆ M_DUO_VALUE
| #define M_DUO_VALUE (*M_DUO_PTR) |
Definition at line 37 of file CDUO3DCamera.cpp.
Variable Documentation
◆ duo_params
| std::map<const mrpt::hwdrivers::TCaptureOptions_DUO3D*,TDUOParams> duo_params |
Definition at line 28 of file CDUO3DCamera.cpp.
Referenced by mrpt::hwdrivers::TCaptureOptions_DUO3D::m_rectify_map_from_yml(), mrpt::hwdrivers::CDUO3DCamera::open(), mrpt::hwdrivers::TCaptureOptions_DUO3D::TCaptureOptions_DUO3D(), and mrpt::hwdrivers::TCaptureOptions_DUO3D::~TCaptureOptions_DUO3D().